
คำอธิบาย
BLDC Motor Driver ไดร์เวอร์มอเตอร์ไฟฟ้ากระแสตรงไร้แปรงถ่าน BLD-750 ไดรเวอร์ DC แบบไร้แปรงถ่าน BLD750 เหมาะสำหรับการปรับความเร็วของมอเตอร์ DC แบบไร้แปรงถ่าน 3 เฟส แรงดันไฟฟ้า 48V ที่มีกำลัง 750W หรือน้อยกว่า สามารถให้การควบคุมความเร็วของ BLDC Motor ด้วยโพเทนชิออมิเตอร์ภายนอก การควบคุมความเร็วแรงดันไฟฟ้าอะนาล็อกภายนอก และคอมพิวเตอร์โฮสต์ (เช่น PLC, ไมโครคอนโทรลเลอร์ ฯลฯ) การปรับความเร็ว PWM และฟังก์ชั่นอื่นๆ ในเวลาเดียวกัน ระบบขับเคลื่อนมีการสตาร์ทด้วยแรงบิดสูง การสตาร์ทและการเบรกอย่างรวดเร็ว การสลับการหมุนไปข้างหน้าและถอยหลัง และการผสมผสานระหว่างการปรับความเร็วด้วยตนเองและอัตโนมัติ
- แรงดันไฟฟ้า Input Voltage DC 24 – 50 Typical Value 48V
- Rated Power 750W
- Rated Current 25-30A
- สำหรับมอเตอร์ BLDC 3 Phase
- สามารถควบคุม มอเตอร์ ทั้งแบบมี Hall Sensor และแบบไม่มี Hall Sensor
- Maximum Speed Support 20000 RPM
- แรงดันสัญญาณฮอลล์ 4.5V-5.5V
- External speed potentiometer 10k Ohm
- DC Cooling Fan
Connecting Terminal
Terminal Pin
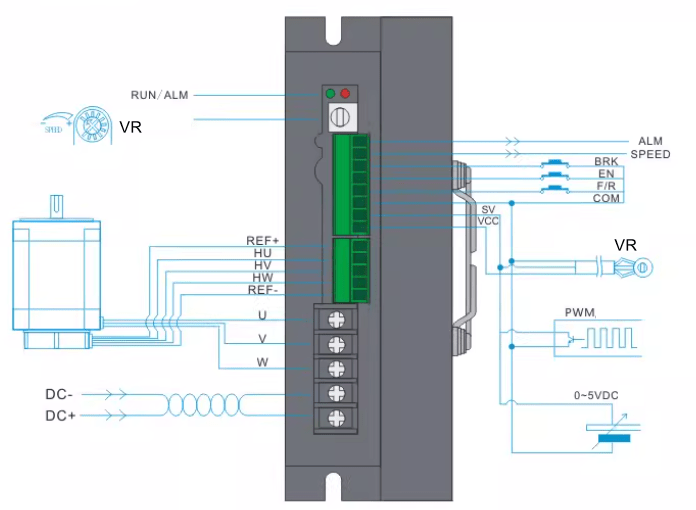
ขั้วสัญญาณไดรเวอร์มอเตอร์
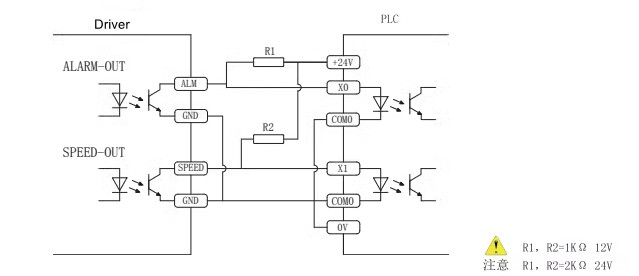
- ALM – เอาต์พุตแจ้งเตือนปกติ 5V / เกิด Fault = 0V
- SPEED – เอาต์พุตพัลส์แสดงความเร็วรอบมอเตอร์ใช้คำนวณรอบ (rpm)
- PUL+ / PUL- – อินพุตสัญญาณพัลส์ควบคุมความเร็ว
- BRK – ควบคุมเบรก High หรือไม่ต่อ = เบรก / Low หรือ ต่อ COM = ทำงาน
- EN – ควบคุม Enable High หรือไม่ต่อ = หยุดแบบชะลอ / Low หรือ ต่อ COM = ทำงาน
- F/R – ควบคุมทิศทาง High หรือไม่ต่อ = เดินหน้า / Low หรือ ต่อ COM = ถอยหลัง
- COM – กราวด์อ้างอิงสัญญาณ (0V)
- SV – อินพุตควบคุมความเร็ว รองรับ Potentiometer / Analog / PWM
- VCC – ไฟเลี้ยงสำหรับ Potentiometer ภายนอก
- REF+ – ไฟเลี้ยง Hall Sensor
- HU / HV / HW – สัญญาณ Hall Sensor (U / V / W)
- REF- – กราวด์ Hall Sensor
- U / V / W – ขั้วต่อเฟสมอเตอร์ BLDC
- DC+ – ไฟเลี้ยงขาเข้า + (DC 24–50V)
- DC- – กราวด์ไฟเลี้ยง (GND)
การทำงานของแต่ละขั้ว (Pin Function Summary)
ควบคุมการทำงาน
| ขั้ว | ฟังก์ชัน |
|---|---|
| ALM | สัญญาณเตือน (5V ปกติ / 0V เมื่อเกิด fault) |
| SPEED | สัญญาณเอาต์พุตความเร็ว ใช้คำนวณรอบ N = (F/P)×60/3 |
| PUL+ / PUL- | อินพุตพัลส์ควบคุมความเร็ว (Pulse Frequency Input) |
| BRK | เบรกมอเตอร์ (High = หยุดทันที, Low = ทำงาน) |
| EN | Enable/Disable มอเตอร์ (High = หยุดช้า, Low = ทำงาน) |
| F/R | หมุนเดินหน้าหรือถอยหลัง (High = Forward, Low = Reverse) |
| COM | Common Ground (0V Reference) |
ควบคุมความเร็วด้วยอนาล็อกหรือ PWM
| ขั้ว | ฟังก์ชัน |
|---|---|
| SV | อินพุตควบคุมความเร็ว (0–5V Analog / PWM / VR) |
| VCC | แหล่งจ่ายให้ Potentiometer ภายนอก |
| REF+ / REF- | แหล่งจ่ายไฟให้ Hall Sensor (5V) และกราวด์ |
สัญญาณ Hall Sensor
| ขั้ว | ฟังก์ชัน |
|---|---|
| HU / HV / HW | สัญญาณ Hall A, B, C ของมอเตอร์ BLDC |
หมายเหตุ: ในข้อมูลซ้ำกันสองรอบ สามารถใช้เฉพาะชุดเดียวได้คือ REF+, REF-, HU, HV, HW
ขั้วมอเตอร์
| ขั้ว | ฟังก์ชัน |
|---|---|
| U / V / W | ต่อกับสายมอเตอร์เฟส U, V, W |
แหล่งจ่ายไฟเข้า
| ขั้ว | ฟังก์ชัน |
|---|---|
| DC+ / DC- | อินพุตไฟฟ้า DC ช่วงแรงดัน 24–52VDC |
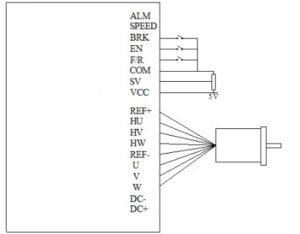
ตัวอย่างการต่อวงจรพื้นฐาน
- ต่อ DC24V–48V เข้าที่ DC+ / DC-
- ต่อมอเตอร์สาย 3 เฟสที่ขั้ว U/V/W
- ต่อ Hall Sensor ที่ HU, HV, HW, และจ่ายไฟผ่าน REF+ / REF-
- ป้อน Pulse จาก PLC หรือ Arduino ที่ PUL+ / PUL-
- ใช้ BRK, EN, F/R ควบคุมการทำงานด้วยสวิตช์หรือลอจิก
- ถ้าควบคุมด้วยแรงดันอนาล็อก เช่น 0–5V ใช้ SV (พร้อม GND ที่ COM)
ในชุดประกอบด้วย
- 1 x ไดรเวอร์ มอเตอร์บัสเลส BLDC Motor Driver 750W
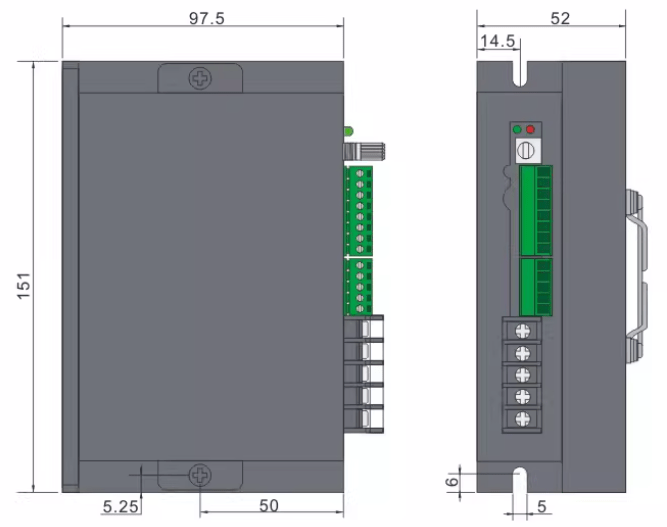
Dimension
Wiring Diagram การต่อสายไฟ
โหมดการควบคุมความเร็ว Speed Regulation Control
- ควบคุมผ่าน Built-in Potentiometer Control
- ควบคุมผ่าน External Potentiometer Control
- ควบคุมผ่าน External analog signal DC 0-5V Control
- ควบคุมผ่าน BLDC PWM Control SV
ข้อดีของมอเตอร์ Brushless DC เทียบกับมอเตอร์ DC
- มอเตอร์กระแสตรงไร้แปรงถ่าน (BLDC) มีประสิทธิภาพสูงและสามารถควบคุมได้ดีเยี่ยม
- สามารถควบคุมได้อย่างต่อเนื่องที่แรงหมุนสูงสุด (แรงบิด) เมื่อเทียบกับมอเตอร์แบบแปรงจะให้แรงบิดสูงสุดในบางจุดเท่านั้นในการหมุน นี่คือสาเหตุที่แม้แต่มอเตอร์ BLDC ขนาดเล็กก็สามารถส่งกำลังได้มาก
- สามารถควบคุมมอเตอร์ BLDC โดยใช้กลไกป้อนกลับเพื่อส่งมอบแรงบิดและความเร็วในการหมุนที่ต้องการอย่างแม่นยำ
- การควบคุมที่แม่นยำจะช่วยลดการใช้พลังงานและการสร้างความร้อน
- ในกรณีที่มอเตอร์ BLDC ใช้พลังงานจากแบตเตอรี่จะทำให้อายุการใช้งานแบตเตอรี่ยาวนานขึ้น
- การสร้างเสียงรบกวนทางไฟฟ้าต่ำเนื่องจากไม่มีแปรงถ่าน และยังก่อให้เกิดประกายไฟเมื่อมีการสัมผัส
- มอเตอร์ BLDC ใช้กันอย่างแพร่หลายในหลาย ๆ แอพพลิเคชั่น
- มอเตอร์ BLDC มีข้อดีในการประหยัดพลังงานเมื่อเทียบกับมอเตอร์ประเภทอื่น ๆ
การใช้งานไดรเวอร์และข้อควรระวัง
- การเดินสายไฟ มอเตอร์ กับ ไดรฟ์ จะต้องดำเนินการในสถานะปิดเครื่อง
- ทิศทางเดินหน้าและถอยหลังของมอเตอร์ ควบคุมโดยขั้วต่อควบคุมเดินหน้าและถอยหลัง F/R
- การตั้งค่าการป้องกันกำลัง: เลือกค่าการตั้งค่า MAX POWER ใกล้กับกำลังพิกัดของมอเตอร์จากตารางการตั้งค่าพารามิเตอร์
- หลังจากเดินสายไฟเสร็จแล้ว ให้เปิดโพเทนชิออมิเตอร์ จากนั้นเปิดเครื่องและจะทำงานได้ตามปกติ ในกรณีของการควบคุมความเร็วแบบอะนาล็อกภายนอกหรือการควบคุมความเร็ว PWM ภายนอก โพเทนชิออมิเตอร์จะต้องปรับไปทางด้านซ้าย
- เมื่อเชื่อมต่อไดรเวอร์เข้ากับแหล่งจ่ายไฟแบบสวิตชิ่ง โปรดระวังอย่ากลับทิศทางบวกและลบ
- กำลังขับของแหล่งจ่ายไฟควรมากกว่าหรือเท่ากับ 1.5 เท่าของกำลังมอเตอร์
การแก้ปัญหา
- ถาม: เหตุใดจึงไม่สามารถควบคุมความเร็วได้เมื่อใช้ไมโครคอนโทรลเลอร์ ?
- ตอบ: หาก ไมโครคอนโทรลเลอร์ ส่งสัญญาณพัลส์ 5V ความต้านทานอนุกรมควรลดลง (1~10K)
- ถาม : เวลาเปิดเครื่องแล้วทำงานอยู่สักพักไฟสีแดงจะติดขึ้นแล้วมอเตอร์จะไม่หมุน ?
- ตอบ: ตรวจสอบการตั้งค่ากำลังขับมอเตอร์ หรือกำลังโหลดมอเตอร์ หากโหลดมอเตอร์ มีขนาดมากเกินไป แนะนำให้เลือกไดรฟ์กำลังสูงขึ้น
- ถาม: ทำไมไฟสีแดงถึงติดเมื่อเปิดเครื่อง?
- ตอบ: สถานการณ์นี้บ่งชี้ถึงสัญญาณเตือนข้อผิดพลาด ให้ตรวจสอบว่าอินพุตที่เกี่ยวข้องผิดหรือกระแสไฟมากเกินไปหรือไม่
- ถาม: บางครั้งมอเตอร์ หยุดเป็นเวลานานก่อนที่จะสตาร์ทระหว่างการทำงาน หรือสตาร์ทไม่ได้?
- ตอบ: สำหรับปัญหานี้ ให้ตรวจสอบก่อนว่าต่อสายไฟผิดหรือไม่ หากถูกต้องให้ตรวจสอบว่าแหล่งจ่ายไฟมีแรงดันน้อยเกินไปหรือไม่




รีวิว
ยังไม่มีบทวิจารณ์