
คำอธิบาย
ไดรเวอร์สเต็ปเปอร์มอเตอร์ Driver Closed-loop Step Motor CL57 Hanpose
- Model CL57
- Valtage DC 18-90V
- The signal input is 5 ~ 24V compatible without external series resistance
- The highest response frequency was 400 KHz
- The torque attenuation is small, the maximum speed up to 3000 rmp
- External alarm and output port in place for convenient monitoringandcontrol
- Intelligent current adjustment, reduce the power consumption whenlowload, and improve the torque when high load
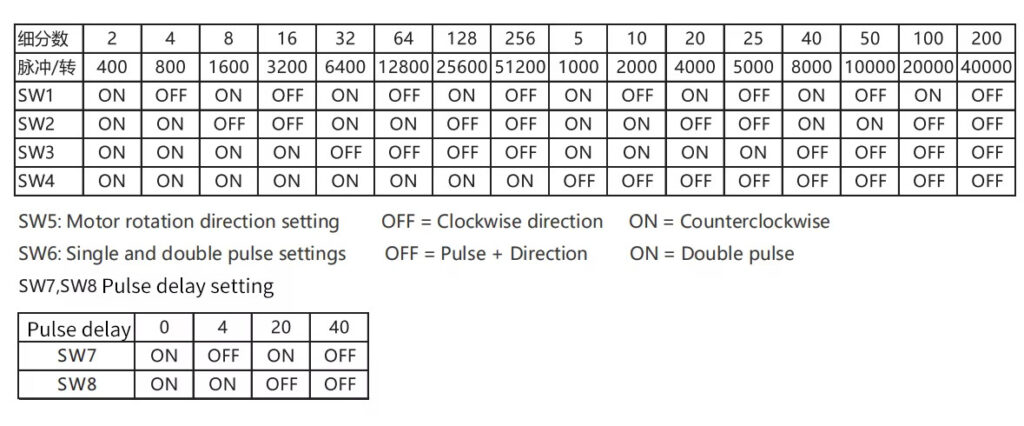
- The effective current can be set through the dial switch to fit different motors
- The dial switch is set for single and double pulse, factory defaultpulse + direction control
อินเตอร์เฟซและการเดินสาย Interface and wiring
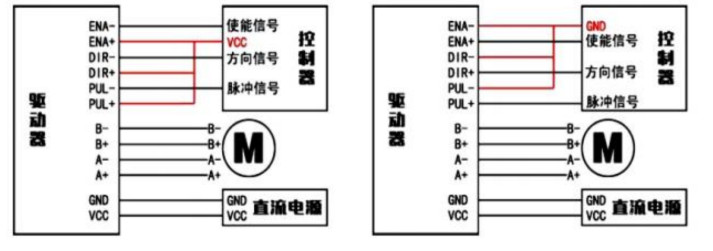
มีวิธีการเชื่อมต่อสัญญาณอินพุต 2 วิธี ได้แก่ การเชื่อมต่อแบบขั้วบวก (Co-anode) และ การเชื่อมต่อแบบขั้วลบ (Co-cathode) โดยผู้ใช้สามารถเลือกใช้ตามความต้องการ
-
PUL (Pulse Signal): สัญญาณพัลส์สามารถใช้แรงดันไฟฟ้าระหว่าง 3.3V ถึง 24V ได้ การทำงานจะมีผลเมื่อสัญญาณเปลี่ยนจาก สูงไปต่ำ และต้องมีความกว้างของพัลส์ไม่น้อยกว่า 2.5 ไมโครวินาที (uS)
-
DIR (Directional Signal): สัญญาณทิศทางสามารถใช้แรงดันไฟฟ้าระหว่าง 3.3V ถึง 24V เพื่อเปลี่ยนทิศทางการหมุนของมอเตอร์ การทำงานจะมีผลเมื่อสัญญาณเปลี่ยนจาก สูงไปต่ำ และต้องมีความกว้างของพัลส์ไม่น้อยกว่า 2.5 ไมโครวินาที (uS)
-
EN (Enable Signal): สัญญาณเปิดใช้งานสามารถใช้แรงดันไฟฟ้าระหว่าง 3.3V ถึง 24V โดยเมื่อสัญญาณเป็น ระดับต่ำ (Low Level) ระบบจะ ปิดกระแสของขดลวดมอเตอร์ ทำให้มอเตอร์อยู่ในสถานะอิสระ และล้างสัญญาณแจ้งเตือน (Alarm Signal)
ข้อควรระวัง:
- ห้ามใช้ VCC และ GND ร่วมกัน ระหว่างตัวควบคุม (Controller) และไดรฟ์ (Drive) ตามภาพตัวอย่าง
- ขั้ว ENA ไม่ได้เชื่อมต่อ โดยเมื่อ ENA ทำงาน มอเตอร์จะอยู่ในสถานะอิสระ (Offline) ทำให้สามารถหมุนเพลามอเตอร์ด้วยมือเพื่อปรับตำแหน่งได้ตามต้องการ หลังจากปรับด้วยมือเสร็จแล้ว ให้ตั้งค่า ENA เป็น ไม่ทำงาน (Invalid) เพื่อกลับเข้าสู่โหมดควบคุมอัตโนมัติ

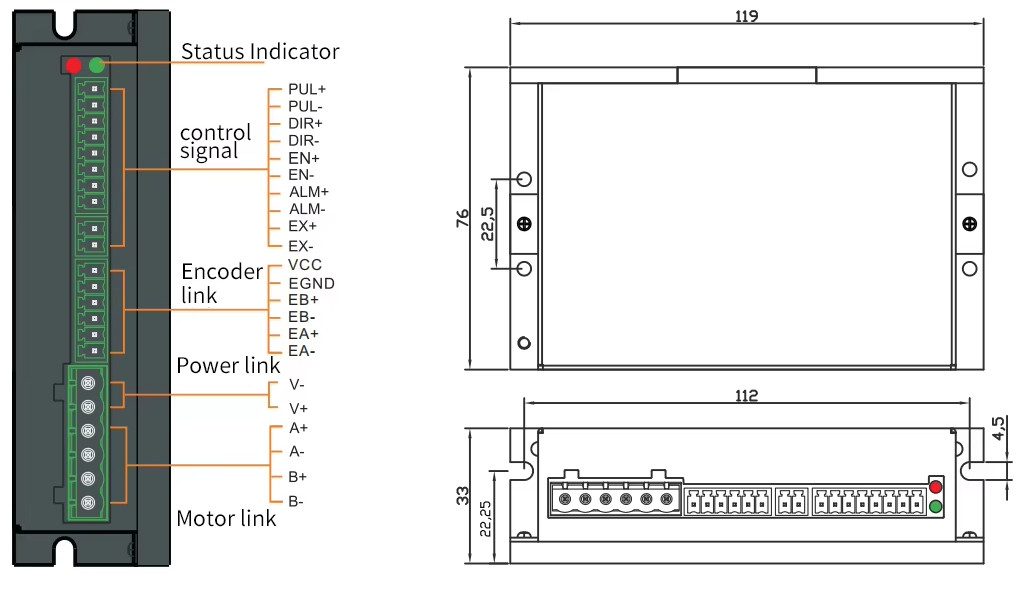
Size
- 119x76x33mm
User Manual
ข้อกำหนดในการเดินสายไฟ
-
ป้องกันสัญญาณรบกวน – ควรใช้สายสัญญาณแบบมีชิลด์ (Shielding Cable) สำหรับสัญญาณควบคุม
-
การแยกสายสัญญาณ –สายสัญญาณพัลส์ (Pulse) และ สายมอเตอร์ แยกเป็นคนละชุดหรือไม่ควรให้อยู่ใกล้กัน เพื่อป้องกันสัญญาณรบกวนจากมอเตอร์ที่อาจส่งผลให้ตำแหน่งของมอเตอร์ผิดพลาด และทำให้ระบบไม่เสถียร
-
ห้ามถอดขั้วจ่ายไฟของไดรฟ์ขณะใช้งาน – เมื่อมอเตอร์หยุดทำงาน ยังมีกระแสไฟไหลผ่านขดลวด หากถอดขั้วจ่ายไฟทันที อาจเกิดแรงดันย้อนกลับสูง (Instantaneous Induced EMF) ซึ่งอาจทำให้ไดรฟ์เสียหายได้
-
ห้ามใช้ตะกั่วบัดกรีที่ปลายสายไฟก่อนเข้าขั้วต่อ – การใช้ตะกั่วบัดกรีอาจทำให้เกิด ความต้านทานสัมผัสสูง ซึ่งอาจทำให้ขั้วต่อเสียหาย





รีวิว
ยังไม่มีบทวิจารณ์