

BDFO05 บอร์ดขับมอเตอร์บัสเลส BLDC Servo Motor drivers SimpleFOC Mini V1.0 DRV8313
Original price was: ฿550.00.฿290.00Current price is: ฿290.00.
มีสินค้า
คำอธิบาย
บอร์ดขับมอเตอร์บัสเลส BLDC Servo Motor drivers SimpleFOC Mini V1.0 DRV8313
- SimpleFOC library and any BLDC motor Open-Source
- DRV8313 H-bridge drivers based Overcurrent protection, Fault detection Deep-sleep more
- Onboard 3.3V LDO regulator maximum current 10mA
- Power supply 8-35V
- Max current 2.5A
- Max Power 100W
- The input control signal is compatible with 3.3V and 5V
- Supports SPWM and SPVMW control algorithms (not support traditional 6-step commutation control algorithms)
- Small package 26mm x 21mm
Three-PhaseBrushless-DCMotorControl
ระวัง: ข้อ จำกัด ด้านพลังงาน Power limitations
- SimpleFOCMini ออกแบบมาสำหรับมอเตอร์ gimbal ที่มีความต้านทานภายในสูงกว่า R>10Ohm กระแสสูงสุดสัมบูรณ์ของบอร์ดนี้คือ 5A โปรดตรวจสอบให้แน่ใจว่ามอเตอร์ BLDC ที่ใช้เป็นไปตามข้อจำกัดเหล่านี้เมื่อใช้บอร์ดนี้ในโครงการของคุณ หากคุณยังต้องการใช้ไดรเวอร์นี้กับมอเตอร์ BLDC ที่มีความต้านทานต่ำมาก R < 1 โอห์ม ตรวจสอบให้แน่ใจว่าได้จำกัดแรงดันไฟฟ้าที่ตั้งค่าไว้ที่บอร์ด
สำหรับข้อมูลเพิ่มเติมเล็กน้อยเกี่ยวกับตัวเลือกของมอเตอร์ โปรดไปที่ BLDC motor docs
https://docs.simplefoc.com/mini_getting_started

https://docs.simplefoc.com/mini_connect_hardware
An example connection of the SimpleFOCMini and Arduino UNO is shown on the image below. 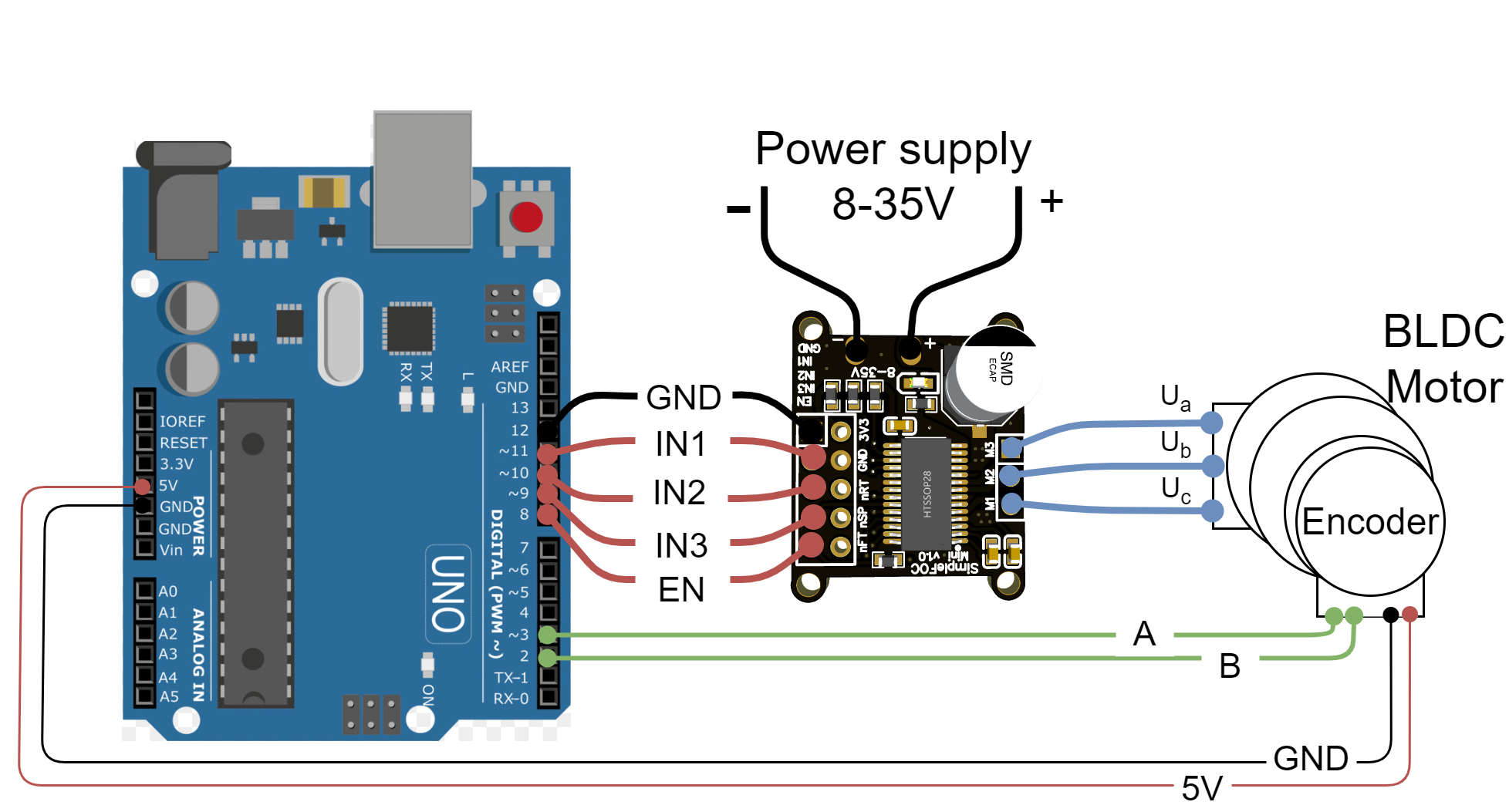
SimpleFOCMini can be directly plugged into the Arduino headers of the UNO board from the pin 8 to the 12 pin (pin 12 can act as a GND pin) and in that way reduce the amount of wires necessary. For more information on this example connection see this library example.
| Mini Pin | EN | IN3 | IN2 | IN1 | GND |
| UNO Pin | 8 | 9 | 10 | 11 | 12 |
Installing the SimpleFOClibrary
- https://docs.simplefoc.com/installation#installing-the-simplefoclibrary
- https://docs.simplefoc.com/library_download
Product List:
- 1x DC brushless motor driver module
- 1x 5P double header
- 1x 3P single header
- 1x 2P single header
BLDC Servo Motor Development Board
- BLDC Servo Motor Development Board https://docs.simplefoc.com/simplefocmini
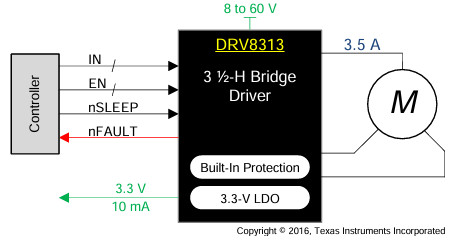
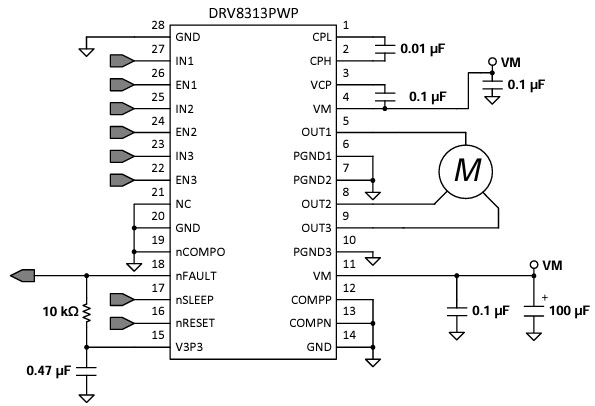
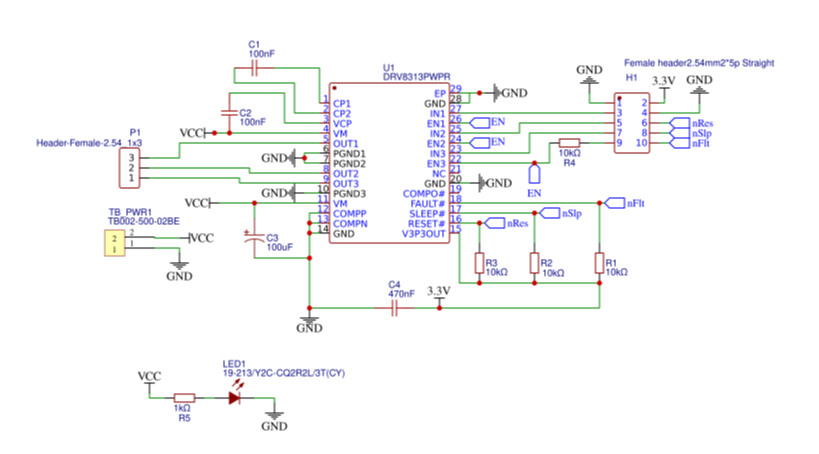
- DRV8313 2.5-A Triple 1/2-H Bridge Driver 65-V max, 3-A peak 3-phase motor driver
- https://www.ti.com/lit/ds/symlink/drv8313.pdf?ts=1650461862269&ref_url=https%253A%252F%252Fwww.google.com%252F
PCB Dimension 20x26mm

// Open loop motor control example
การใช้ Simple FocMini ควบคุม BLDC Motor ผ่าน Arduino
คุณอาจจะชื่นชอบ…

สินค้าที่เกี่ยวข้อง
-

DMBL07 ไดรเวอร์ มอเตอร์บัสเลส BLDC Motor Driver DC24-48V/5A BLD405E 120W
฿990.00มีสินค้า
หยิบใส่ตะกร้า -

DMBL19 ไดรเวอร์ มอเตอร์บัสเลส BLDC Motor Driver DC18-50V/15A BLD-5015A
฿2,850.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า -

ICDV10 ไอซีไดรเวอร์มอเตอร์ IC DRV8313PW 3-Phase Brushless DC Motor Controller
฿190.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า

รีวิว
ยังไม่มีบทวิจารณ์