
คำอธิบาย
ไดรเวอร์สเต็ปเปอร์มอเตอร์ระบบ Closed-Loop ประสิทธิภาพสูง รองรับแรงดันไฟ DC 18-90V ควบคุมการเคลื่อนที่ได้แม่นยำ ลดการสูญเสียสเต็ป เพิ่มแรงบิดในรอบสูง เหมาะสำหรับเครื่องจักรอัตโนมัติ CNC และระบบ Motion Control ที่ต้องการความเสถียรสูง
คุณสมบัติเด่น
- ระบบ Closed-Loop Control ลดปัญหามอเตอร์หลุดสเต็ป
- อินพุตสัญญาณควบคุม 5-24V ใช้งานได้โดยไม่ต้องเพิ่มตัวต้านทานภายนอก
- ความเร็วรอบสูงสุดถึง 3000 RPM
- มีสัญญาณ Alarm Output และ In-Position Output สำหรับตรวจสอบสถานะการทำงาน
- ปรับกระแสอัตโนมัติตามโหลด ช่วยลดการใช้พลังงานและเพิ่มแรงบิดเมื่อจำเป็น
- ตั้งค่ากระแสขับมอเตอร์ผ่าน DIP Switch ได้หลายระดับ
- รองรับโหมด Pulse + Direction และ Single/Double Pulse
สเปกสินค้า (Specifications)
| รายการ | รายละเอียด |
|---|---|
| รุ่น | CL57 |
| ประเภท | Closed-Loop Stepper Driver |
| แรงดันไฟเลี้ยง | DC 18-90V |
| แรงดันสัญญาณอินพุต | 5-24VDC |
| ความถี่พัลส์สูงสุด | 400kHz |
| ความเร็วรอบสูงสุด | 3000 RPM |
| ระบบควบคุม | Closed-Loop Control |
| การตั้งค่ากระแส | DIP Switch |
| รูปแบบสัญญาณควบคุม | Pulse + Direction, Single Pulse, Double Pulse |
| เอาต์พุตสถานะ | Alarm Output, In-Position Output |
อินเตอร์เฟซและการเดินสาย Interface and wiring
มีวิธีการเชื่อมต่อสัญญาณอินพุต 2 วิธี ได้แก่ การเชื่อมต่อแบบขั้วบวก (Common-anode) และ การเชื่อมต่อแบบขั้วลบ (Common-cathode) โดยผู้ใช้สามารถเลือกใช้ตามความต้องการ
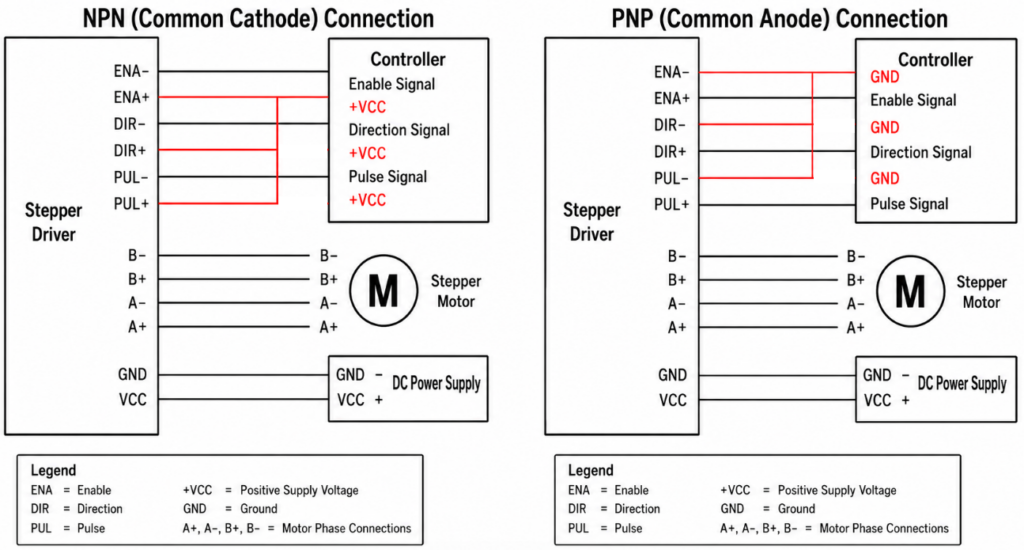
- PUL (Pulse Signal): สัญญาณพัลส์สามารถใช้แรงดันไฟฟ้าระหว่าง 3.3V ถึง 24V ได้ การทำงานจะมีผลเมื่อสัญญาณเปลี่ยนจาก สูงไปต่ำ และต้องมีความกว้างของพัลส์ไม่น้อยกว่า 2.5 ไมโครวินาที (uS)
- DIR (Directional Signal): สัญญาณทิศทางสามารถใช้แรงดันไฟฟ้าระหว่าง 3.3V ถึง 24V เพื่อเปลี่ยนทิศทางการหมุนของมอเตอร์ การทำงานจะมีผลเมื่อสัญญาณเปลี่ยนจาก สูงไปต่ำ และต้องมีความกว้างของพัลส์ไม่น้อยกว่า 2.5 ไมโครวินาที (uS)
- EN (Enable Signal): สัญญาณเปิดใช้งานสามารถใช้แรงดันไฟฟ้าระหว่าง 3.3V ถึง 24V โดยเมื่อสัญญาณเป็น ระดับต่ำ (Low Level) ระบบจะ ปิดกระแสของขดลวดมอเตอร์ ทำให้มอเตอร์อยู่ในสถานะอิสระ และล้างสัญญาณแจ้งเตือน (Alarm Signal)
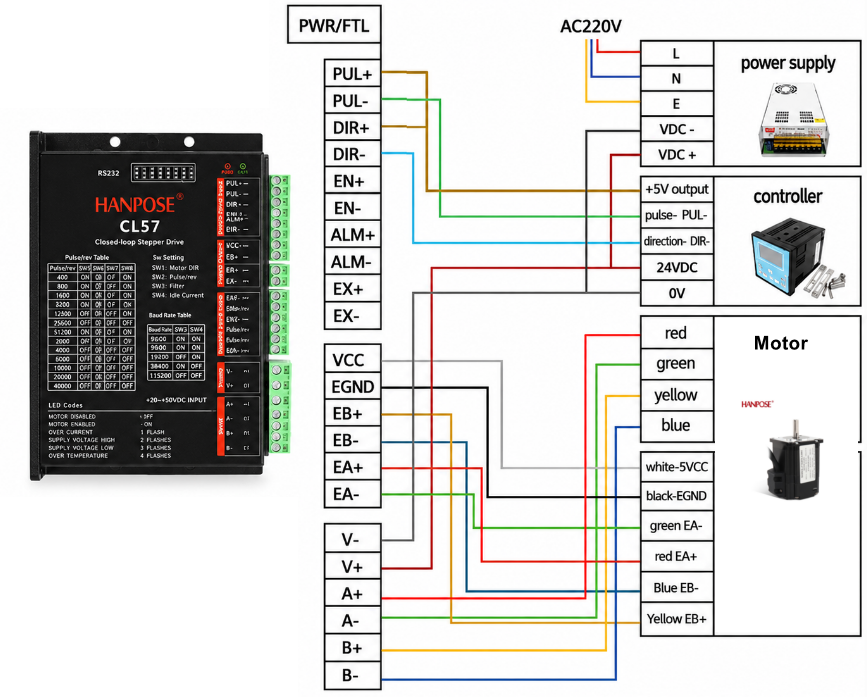
Wiring
Dip Switch Setting
SW1-SW4 Microstep Resolution / Pulse Per Revolution DIP Switch Settings
| Microstep Resolution | 2 | 4 | 8 | 16 | 32 | 64 | 128 | 256 | 5 | 10 | 20 | 25 | 40 | 50 | 100 | 200 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pulses / Revolution | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 | 51200 | 1000 | 2000 | 4000 | 5000 | 8000 | 10000 | 20000 | 40000 |
| SW1 | ON | OFF | ON | OFF | ON | OFF | ON | OFF | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
| SW2 | ON | ON | OFF | OFF | ON | ON | OFF | OFF | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
| SW3 | ON | ON | ON | ON | OFF | OFF | OFF | OFF | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
| SW4 | ON | ON | ON | ON | ON | ON | ON | ON | OFF | OFF | OFF | OFF | OFF | OFF | OFF | OFF |
SW5-SW6
| สวิตช์ | OFF | ON | คำอธิบาย |
|---|---|---|---|
| SW5 | หมุนตามเข็มนาฬิกา (Clockwise, CW) | หมุนทวนเข็มนาฬิกา (Counterclockwise, CCW) | กำหนดทิศทางการหมุนเริ่มต้นของมอเตอร์ |
| SW6 | Pulse + Direction | Double Pulse (CW/CCW Pulse) | เลือกรูปแบบสัญญาณควบคุม |
แนะนำการตั้งค่า
PLC Mitsubishi FX3U / FX5U
- SW7 = ON
- SW8 = ON
- Delay = 0 μs
ใช้งานได้ปกติในเกือบทุกกรณี เพราะ PLC มีการจัดการ Timing อยู่แล้ว
Arduino / ESP32
- SW7 = OFF
- SW8 = ON
- Delay = 4 μs
ช่วยเพิ่มความเสถียรเมื่อเปลี่ยนทิศทางบ่อย
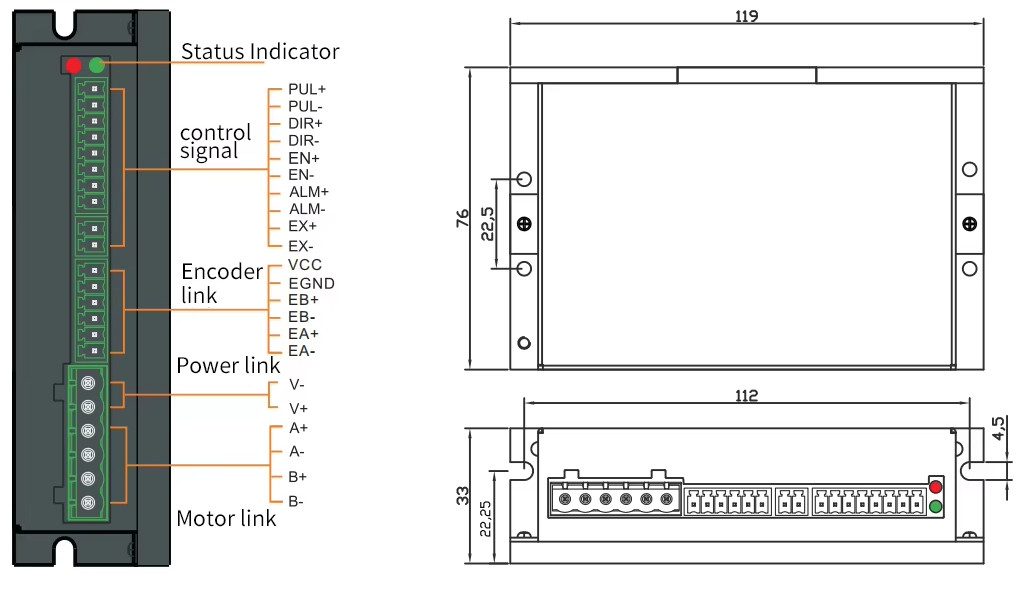
Dimension
- 119x76x33mm
User Manual
ข้อกำหนดในการเดินสายไฟ
- ป้องกันสัญญาณรบกวน – ควรใช้สายสัญญาณแบบมีชิลด์ (Shielding Cable) สำหรับสัญญาณควบคุม
- การแยกสายสัญญาณ –สายสัญญาณพัลส์ (Pulse) และ สายมอเตอร์ แยกเป็นคนละชุดหรือไม่ควรให้อยู่ใกล้กัน เพื่อป้องกันสัญญาณรบกวนจากมอเตอร์ที่อาจส่งผลให้ตำแหน่งของมอเตอร์ผิดพลาด และทำให้ระบบไม่เสถียร
- ห้ามถอดขั้วจ่ายไฟของไดรฟ์ขณะใช้งาน – เมื่อมอเตอร์หยุดทำงาน ยังมีกระแสไฟไหลผ่านขดลวด หากถอดขั้วจ่ายไฟทันที อาจเกิดแรงดันย้อนกลับสูง (Instantaneous Induced EMF) ซึ่งอาจทำให้ไดรฟ์เสียหายได้
- ห้ามใช้ตะกั่วบัดกรีที่ปลายสายไฟก่อนเข้าขั้วต่อ – การใช้ตะกั่วบัดกรีอาจทำให้เกิด ความต้านทานสัมผัสสูง ซึ่งอาจทำให้ขั้วต่อเสียหาย
การนำไปใช้งาน
- เครื่อง CNC Router
- เครื่องเลเซอร์และเครื่องแกะสลัก
- เครื่องบรรจุภัณฑ์อัตโนมัติ
- เครื่องพิมพ์และเครื่องตัดอัตโนมัติ
- เครื่องหยิบจับชิ้นงาน (Pick & Place)
- ระบบสายพานลำเลียง
- เครื่องจักรอุตสาหกรรมที่ใช้มอเตอร์ NEMA23 Closed-Loop
- ระบบ Motion Control และ Automation
ในชุดประกอบด้วย
- ไดรเวอร์สเต็ปเปอร์มอเตอร์ Hanpose CL57 จำนวน 1 ตัว
ปัญหาที่พบบ่อยและวิธีแก้ไข
| อาการ | สาเหตุที่เป็นไปได้ | วิธีแก้ไข |
|---|---|---|
| มอเตอร์ไม่หมุน | ไม่มีไฟเลี้ยงเข้าระบบ | ตรวจสอบแหล่งจ่ายไฟให้อยู่ในช่วงแรงดันที่กำหนด |
| – | – | |
| ไดรเวอร์อยู่ในสถานะป้องกัน (Protection) | ตรวจสอบและแก้ไขสาเหตุของความผิดปกติ จากนั้นรีสตาร์ทไดรเวอร์ | |
| สัญญาณ Enable (ENA) อยู่ในระดับต่ำหรือไม่ได้ต่อสาย | ตรวจสอบและเชื่อมต่อสัญญาณ Enable ให้ถูกต้อง | |
| ปัญหาที่สัญญาณควบคุม (Pulse/Direction) | ตรวจสอบความถี่และความกว้างของสัญญาณควบคุม หากเริ่มต้นที่ความเร็วสูงเกินไป ควรใช้การเร่งความเร็ว (Acceleration) อย่างเหมาะสม | |
| มอเตอร์หมุนผิดทิศทาง | ต่อสายเฟสมอเตอร์ผิด | สลับสายของเฟสเดียวกัน เช่น A+ กับ A− หรือ B+ กับ B− |
| สายมอเตอร์ขาดหรือวงจรเปิด | ตรวจสอบสายมอเตอร์และแก้ไขการเชื่อมต่อ | |
| ไฟ Alarm ติดค้าง | ต่อสายมอเตอร์ผิด | ตรวจสอบการเดินสายมอเตอร์ |
| แรงดันไฟฟ้าสูงเกินไป หรืออุณหภูมิสูงเกินกำหนด | ตรวจสอบแรงดันไฟเลี้ยง และปล่อยให้ไดรเวอร์เย็นลงก่อนใช้งาน | |
| มอเตอร์หรือไดรเวอร์เสียหาย | เปลี่ยนมอเตอร์หรือไดรเวอร์ใหม่ | |
| ตำแหน่งคลาดเคลื่อน (Position Error) | สัญญาณรบกวน (Noise) | ลดสัญญาณรบกวน ใช้สาย Shield และต่อกราวด์ให้ถูกต้อง |
| ต่อสายกราวด์ไม่ถูกต้อง หรือไม่มีกราวด์ | ติดตั้งระบบกราวด์ที่มีประสิทธิภาพ | |
| มอเตอร์สะดุด หยุดหมุน หรือสูญเสียสเต็ป (Lost Step) | ตั้งค่า Microstep (Subdivision) ไม่ถูกต้อง | ตั้งค่า Microstep ให้เหมาะสม |
| สัญญาณควบคุมไม่เป็นไปตามข้อกำหนด | ตรวจสอบ Timing ของสัญญาณ Pulse และ Direction | |
| แรงบิดมอเตอร์ไม่เพียงพอ | เลือกใช้มอเตอร์ที่มีแรงบิดสูงขึ้น | |
| แรงดันไฟเลี้ยงต่ำ หรือกระแสไม่เพียงพอ | เพิ่มแรงดันไฟเลี้ยง หรือปรับค่ากระแสของไดรเวอร์ให้สูงขึ้น |
ขั้นตอนการตรวจสอบเบื้องต้น
- ตรวจสอบไฟเลี้ยงของไดรเวอร์
- ตรวจสอบการต่อสายมอเตอร์ (A+, A−, B+, B−)
- ตรวจสอบสัญญาณ PUL, DIR และ ENA
- ตรวจสอบการต่อกราวด์และสาย Shield
- หากยังไม่สามารถแก้ไขได้ ให้ทดลองเปลี่ยนมอเตอร์หรือไดรเวอร์เพื่อแยกหาสาเหตุของปัญหา
คำแนะนำ: ปัญหาส่วนใหญ่เกิดจากการต่อสายมอเตอร์ผิด การตั้งค่ากระแสไม่เหมาะสม หรือการเร่งความเร็วสูงเกินไปในขณะเริ่มหมุน ซึ่งควรตรวจสอบ 3 จุดนี้เป็นอันดับแรกก่อนเปลี่ยนอุปกรณ์ใหม่.
คู่มือวิเคราะห์สถานะไฟ LED ของไดรเวอร์มอเตอร์
ไฟแสดงสถานะ (LED Indicator) บนไดรเวอร์มอเตอร์สามารถใช้ตรวจสอบสภาวะการทำงานและวิเคราะห์ปัญหาเบื้องต้นได้ โดยมีรายละเอียดดังนี้
| สถานะไฟ LED | ความหมาย | สถานะมอเตอร์ |
|---|---|---|
| 🟢 ไฟสีเขียวกระพริบ | ไดรเวอร์ทำงานปกติ แต่ยังไม่ได้รับสัญญาณพัลส์ (No Pulse Signal) | มอเตอร์หยุดทำงาน (Motor Stop) |
| 🟢 ไฟสีเขียวสว่างค้าง | ไดรเวอร์ได้รับสัญญาณพัลส์และกำลังสั่งงานมอเตอร์ | มอเตอร์กำลังหมุน (Motor Running) |
| 🟢 1 ครั้ง + 🔴 กระพริบตามจำนวนครั้ง |
รหัสแจ้งเตือน (Alarm Code)
เมื่อไฟสีเขียวกระพริบ 1 ครั้ง สลับกับไฟสีแดงกระพริบ ให้สังเกตจำนวนครั้งของไฟสีแดงเพื่อระบุสาเหตุของปัญหา
| จำนวนครั้งไฟแดง | Alarm Code | สาเหตุ |
|---|---|---|
| 🔴 1 ครั้ง | Over Current / Short Circuit | กระแสไฟเกิน หรือเกิดไฟฟ้าลัดวงจร |
| 🔴 2 ครั้ง | Open Motor Phase | ไม่พบการเชื่อมต่อมอเตอร์ หรือสายมอเตอร์ต่อไม่ถูกต้อง |
| 🔴 3 ครั้ง | Over Voltage | แรงดันไฟฟ้าขาเข้าสูงเกินกำหนด |
| 🔴 4 ครั้ง | Under Voltage | แรงดันไฟฟ้าขาเข้าต่ำเกินกำหนด |
| 🔴 5 ครั้ง | Tracking Error | ตำแหน่งมอเตอร์คลาดเคลื่อนจากคำสั่งเกินค่าที่กำหนด |





รีวิว
ยังไม่มีบทวิจารณ์