
คำอธิบาย
เซนเซอร์วัดลม วัดความเร็วลมและอุณหภูมิด้วย Sensor วัดความเร็วลมเอาท์พุตแบบอะนาล็อก วัดความเร็วลมแบบความร้อนที่ใช้เทคนิค ในการวัดความเร็วลมที่เรียกว่าเทคนิค “Hot-Wire” Technique.
Specifications
- Supply Voltage DC 5V
- Supply current 20 – 40 mA (Depending on wind speed)
- Output signal analog 0 – 5V
- Wind Velocities
- 0 – 60 mph (Miles per hour ,ไมล์ต่อชั่วโมง)
- 0 – 97 km/h (กิโลเมตรต่อชั่วโมง)
Pinout
- GND Ground
- +V แรงดันไฟฟ้า DC5V
- Out แรงดันไฟขาออก แรงดัน RV คูณด้วย 3 และ ตามการตั้งค่าบนโพเทนชิออมิเตอร์ แรงดันไฟขาออกนี้จะ saturate ( Ground หรือ +V) หากอุณหภูมิโดยรอบเปลี่ยนแปลงไปมากจากอุณหภูมิเมื่อเซ็นเซอร์ถูกปรับเทียบ ความไวของเอาต์พุตนี้สามารถเปลี่ยนแปลงได้โดยการเปลี่ยน R11 ความไวที่สูงขึ้นจะทำให้เซ็นเซอร์อิ่มตัวได้ง่ายขึ้นเมื่ออุณหภูมิโดยรอบเปลี่ยนแปลง
- RV คือแรงดันลูป Loop ใช้สำหรับสอบเทียบเอาต์พุต RV จะไม่ Saturate และจะไม่ต่ำกว่า 1.8 V
เอาต์พุตอุณหภูมิ - TMP เทอร์มิสเตอร์ตัวแบ่งแรงดันไฟฟ้า โดยจะอ่านค่าได้ประมาณ 2.8 V ที่อุณหภูมิห้อง 25 C เมื่อแรงดันไฟฟ้าลดลงตามอุณหภูมิที่สูงขึ้น และแรงดันไฟฟ้าเพิ่มขึ้นด้วยอุณหภูมิจะต่ำลง
Arduino Sorcce Code
Hardware Setup Wind Sensor < > Arduino
- GND < > GND
- +V < > 5V
- RV < > A1 // Wind Sensor is powered from a regulated five volt source. WindSpeed_MPH
- TMP < > A0 // TempC thermistor value from sensor
https://github.com/moderndevice/Wind_Sensor
Schematic
Dimensions
- 17mmx40mm
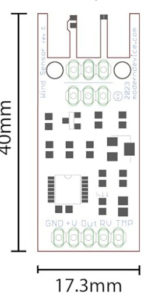
การติดตั้ง มีรู 2.5mm 2 รู สำหรับยึดสกรู



รีวิว
ยังไม่มีบทวิจารณ์