คำอธิบาย
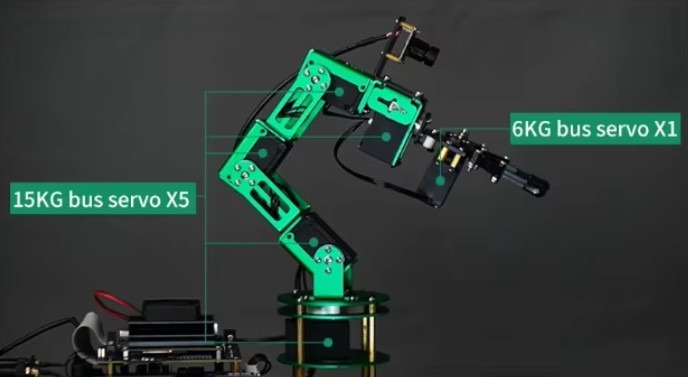
Intelligent Serial Bus Servo Robotic Arm (6Kg) Serial Bus Servo ควบคุมแม่นยำ อ่านค่าตำแหน่งย้อนกลับได้ เหมาะทั้งงานการศึกษา งานทดลอง และงานพัฒนา Automation ที่ต้องการความเสถียร
คุณสมบัติเด่น
- ใช้ Bus Servo แรงบิดสูง
- 6Kg จำนวน 1 ตัว Servo Gripper กริปเปอร์ เฟือง: Plastic Gear
- รองรับการ Read back ข้อมูลจริงจากเซอร์โว เช่น ตำแหน่ง สถานะ และพารามิเตอร์
- ควบคุมผ่าน UART Serial Bus ต่อพ่วงแบบ Cascade ได้
- มีระบบป้องกันเมื่อโรเตอร์ติดขัด (Protection Lock)
- ค่าการตั้งค่าเซอร์โวถูกบันทึกอัตโนมัติเมื่อปิดไฟ
สเปกสินค้า (Specifications) 6KG Bus Servo (Gripper)
- แรงดันไฟเลี้ยง: DC 4.8 – 6.0V
- แรงบิดพิกัด: ≥6 kgf·cm @6.0V
- มุมหมุน: 180° ±10°
- กระแสขณะไม่มีโหลด: ≤120 mA
- กระแสขณะ Stall: ≤1.7 A
- ความแม่นยำ: ≤1°
- เฟือง: Plastic Gear
- ขนาด: 40.6 × 20 × 41.8 mm
- Servo ID: 6
Dimension
ระบบสื่อสารและควบคุม
- วิธีควบคุม: UART Serial Bus
- Baud rate: 115200
- Interface: PH2.0 3-Pin
การใช้งาน
- แขนกลเพื่อการศึกษา Robotics / Mechatronics
- ระบบทดลอง Motion Control และ Serial Bus Servo
- งานวิจัยและพัฒนา AI Vision + Robot Arm
- Training Kit สำหรับมหาวิทยาลัยและสาย Automation
- Prototype แขนกลขนาดเล็กในโรงงาน
ในชุดประกอบด้วย
- 6KG Bus Servo สำหรับกริปเปอร์
- สาย Bus Servo และสายเชื่อมต่อ
ขั้นตอน Set the DOFBOT Servo ID
หลักการ
- ฟังก์ชัน Set ID จะตั้งค่า ID ให้ “ทุกเซอร์โวที่ต่ออยู่พร้อมกัน” เป็นหมายเลขเดียวกัน
- ห้ามตั้งพร้อมกันหลายตัว ต้องตั้งทีละตัว และต้องถอดสายออกทุกครั้ง
- ต้องเริ่มตั้งจาก Servo ID 6 ไล่ลงมาจนถึง ID 1 เท่านั้น
ขั้นตอนโดยสรุป
- เปิดโปรแกรม DOFBOT Host Computer และเชื่อมต่อแขนกล
- ตรวจสอบการเชื่อมต่อโดยกดไฟ RGB หากไฟติด แสดงว่าเชื่อมต่อปกติ
- ตั้งค่า ID = 6 แล้วกด Setting
- ถอดสาย Servo หมายเลข 6 ออกทันที
- ตั้งค่า ID = 5 แล้วกด Setting
- ถอดสาย Servo หมายเลข 5
- ทำซ้ำตามลำดับ ID = 4 → 3 → 2 → 1
- เมื่อครบทุกตัว ให้เสียบสายเซอร์โวทั้งหมดกลับเข้าที่เดิม
- ทดสอบควบคุมเซอร์โวแต่ละแกนแยกกันเพื่อยืนยันว่า ID ถูกต้อง
ข้อควรระวัง
- ไม่ควรใช้ฟังก์ชัน Set ID บ่อยโดยไม่จำเป็น
- หากตั้งผิด จะทำให้เซอร์โวทุกตัวชน ID กันและระบบจะทำงานผิดพลาดทันที
- เป็นขั้นตอนเชิงเทคนิค ไม่เหมาะกับการลองผิดลองถูก
เอกสารอ้างอิง:
Set the dofbot servo ID




รีวิว
ยังไม่มีบทวิจารณ์