

MCCS03 กล่องควบคุม สเต็ปมอเตอร์ ตั้งโปรแกรมได้ Programmable Motion Control 1CH-SH01 PMCS201
฿1,590.00
มีสินค้า
คำอธิบาย
ตัวควบคุมสเต็ปเปอร์มอเตอร์ ตัวควบคุมเซอร์โวมอเตอร์ การควบคุม Pulse การควบคุมความเร็ว การควบคุมการเคลื่อนที่แบบแกนเดียว ตั้งโปรแกรมได้ 1CH PMCS201
Stepper Motor Programmable Motion Control 1CH-SH01
- Voltage Input AC220V ± 15%
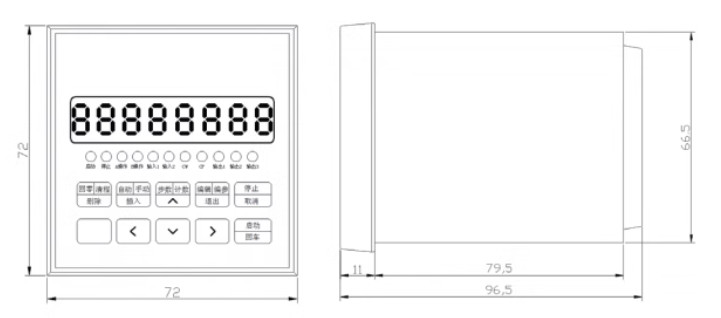
- Dispaly 8 Digits
- ควบคุม Stepper Motor 1 ตัว
- ความถี่เอาต์พุตสูงสุด Maximum output frequency 40KHz
- ความละเอียดความถี่เอาต์พุต Output frequency resolution 1Hz
- Input 6 อินพุต สำหรับต่อสวิตช์ควบคุม (Opto-Isolation)
- Output 3 เอาต์พุต สำหรับต่อรีเลย์ข DC24V (Opto-Isolation) Continuous displacement range -7999999 ~ 7999999
- โปรแกรมสูงสุด 99 Step
การทำงาน
- การทำงานอัตโนมัติ, การดำเนินการด้วยตนเอง Manaul Jog, การแก้ไขโปรแกรม , การตั้งค่าพารามิเตอร์
Automatic operation function
- Programming instructions 14 instructions
- สามารถแก้ไขได้ สามารถควบคุมการเริ่มและหยุดการทำงานอัตโนมัติได้ผ่านปุ่มควบคุมบนแผง Display
Manual operation function
- ตำแหน่งที่ปรับได้ (สามารถตั้งค่าความเร็ว และจำนวน Step ผ่านปุ่มควบคุมบนแผง Display
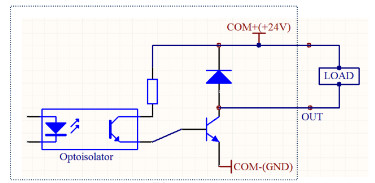
ลักษณะโครงสร้างภายในวงจรเอาต์พุตสำหรับขับรีเลย์ 24VDC
ในชุดประกอบด้วย
- กล่องควบคุมสเต็ปเปอร์มอเตอร์ Stepper Motor Programmable Motion Control SH01
คู่มือการโปรแกรมกล่องควบคุมสเต็ปเปอร์มอเตอร์
Stepper Motor Programmable Motion Controller
Dimension Panel Cut

Terminals L
- Start Switch
- STOP Switch
- Limit Switch A = LT2 Operate Mode
- Limit Switch B = LT1 Operate Mode
- Input 1 Switch ENT 1
- Input 2 Switch ENT 2
- GND
Terminals R
- Direction
- Pulse
- External Power Supply DC +5V
- Output 1
- Output 2
- Output 3
- External Power Supply DC +24V/0.3A
LED Status
- LED Start
- LED STOP
- LED Limit Switch A
- LED Limit Switch B
- LED Input 1 Switch ENT1
- LED Input 2 Switch ENT2
- LED CP Pulse signal indicator light
- LED CW Direction indicator light
- LED Output 1
- LED Output 2
- LED Output 3
ตัวอย่างโปรแกรม Program Simple Motion
| Step | Name | Value | Unit |
| 00 | SPEED | 15000 | Hz |
| 01 | G-LEN | 20000 | STEP |
| 02 | DELAY | 1000 | mS |
| 03 | SPEED | 2000 | Hz |
| 04 | G-LEN | -20000 | STEP |
| 05 | OUT | 1000 | Out1 On |
| 06 | DELAY | 2000 | mS |
| 07 | OUT | 0000 | Out1 Off |
| 08 | DELAY | 1000 | mS |
| 09 | END |
ตารางคำสั่งทั้งหมดที่มี จะเห็นเมื่อกดขึ้น กดลง วนไปเรื่อยๆ ผู้ใช้งานต้องกดเลื่อนหาจนกว่าจะได้คำสั่งที่ต้องการ
| Command | Description |
| PAUSE | หยุดชั่วคราว |
| G-LEN | GO LENGHT |
| SPEED | ความเร็ว |
| DELAY | DELAY |
| JUMP | JUMP |
| LOOP | LOOP |
| GOTO | GOTO |
| OUT | OUT |
| J-BIT | J-BIT |
| J-CNT | J-CNT |
| Go-rb | Go-rb |
| CNE-I | CNE-I |
| CNE-O | CNE-O |
| CLR | CLR |
| END | END |
ตั้งค่าพารามิเตอร์ Parameter setting
การตั้งค่าพารามิเตอร์ทำได้ ในโหมดแมนนวล
- ให้กดปุ่ม MANV แก้ไข และกดปุ่ม EDIT ค้างไว้ 2 วินาทีขึ้นไป
|
Parameter setting
|
|||||
| Number | Name |
Parameter display form
|
Data range (unit) | Parameter Description | |
| 1 | Take-off frequency | ความถี่ในการ Take-off | JF------ JF××××× |
400—39999 (Hz) |
If the set value is less than 400HZ, the system will alarm; users can set different take-off frequencies according to their actual conditions. |
| 2 | Lift and drop curve | Curve Profile | rS------ rS × |
L, H (Article) |
There are two speed up and down curves inside the controller, L is the slower curve; H is a faster curve, and different acceleration and deceleration curves can be selected according to the actual load conditions. |
| 3 | Backlash compensation | การชดเชย เฟืองแบคแลช | CC------ CC ×××× |
0—9999 (Number of pulses) |
Mainly used to compensate for errors caused by backlash of rotating mechanisms (such as screws, gears, etc.). The compensated displacement is not displayed on the controller. |
| 4 | Manual increment | การเพิ่มขึ้นด้วยตนเอง | HL------ HL×××××× |
1—999999 (Number of pulses) |
In the manual state, the displacement of the stepper motor during manual operation; if the set value is equal to0, the system will alarm. |
| 5 | Manual speed | ความเร็วแบบแมนนวล | HF------ HF××××× |
1—39999 (Hz) |
In the manual state, the running speed of the stepper motor during manual operation; if the set value is equal to0, the system will alarm. |
| 6 | Return to zero speed | กลับสู่ความเร็วเป็น 0 | bF------ bF××××× |
1—39999 (Hz) |
The running speed of the stepper motor during zero return operation; if the set value is equal to 0, the system will alarm. |
| 7 | (Limit A) A Operation Address |
(Limit A) Address | nA------ nA ×× |
00—99 (line number) |
When the program is running, if “(limitA)A “Operation” has a signal input, the motor decelerates and stops, the program is interrupted here, the program remembers the coordinate value of the interruption, and the program jumps to the line number specified Run the program at the program. |
| 8 | (Limit B) B Operation Address |
(Limit B) Address | nB------ nB ×× |
00—99 (line number) |
When the program is running, if “(limitB)B “Operation” has a signal input, the motor decelerates and stops, the program is interrupted here, the program remembers the coordinate value of the interruption, and the program jumps to the line number specified Run the program at the program. |
| 9 | Pulse mode | โหมดพัลส์ | CP------ CP × |
0, 1 | CP=0 means single pulse output, and the CP terminal on the rear panel outputs step pulses, CW terminal output direction level; CP=1 means double pulse output, and the CP terminal on the rear panel outputs a forward step pulse, CW terminal outputs reverse step pulse |
- https://docs.google.com/spreadsheets/d/1quPxIqro2cfn8gWsaMrVXQ4wHTYH_Q2EEv0W3u-InQw/edit?usp=sharing
- การตั้งค่าพารามิเตอร์ Parameter setting Number 8 ร่วมกับการตั้งโปรแกรม
- เพิ่ม Limit Switch A และ Limit Switch B บนเทอร์มินัล
- จะสามารถดำเนินการขัดจังหวะจากภายนอกได้
การต่อเพิ่ม Limit Switch A LT1 และ Limit Switch B LT2 บนเทอร์มินัล 2 ตัว
- Terminal 4 = LT1 คู่กับ GND
- Terminal 5 = LT2 คู่กับ GND
Wiring Diagram ไฟเลี้ยงมอเตอร์ 24VDC/10A
- ตัวควบคุมสเต็ปเปอร์มอเตอร์คืออะไร?
- การใช้ไดรเวอร์สเต็ปเปอร์มอเตอร์?
- เลือกไดรเวอร์สเต็ปเปอร์มอเตอร์?
- ใช้สเต็ปเปอร์มอเตอร์โดยไม่มีไดรเวอร์
คุณอาจจะชื่นชอบ…

สินค้าที่เกี่ยวข้อง
-

DMST08 ไดรเวอร์ สเต็ปเปอร์มอเตอร์ Driver Stepper Motor DC20-50V/4.2A DM542
฿890.00มีสินค้า
หยิบใส่ตะกร้า -

DMST02 ไดรเวอร์ สเต็ปเปอร์มอเตอร์ Stepping Motor Driver 35V/3A TB6560
฿290.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า -

DMST10 ไดรเวอร์ สเต็ปเปอร์มอเตอร์ Driver Stepper Motor AC/DC 7.2A DM860
฿1,050.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า

รีวิว
ยังไม่มีบทวิจารณ์