

คำอธิบาย
ดิจิตอลเซอร์โวมอเตอร์แรงบิดสูง Super Hi Torque Digital Servo Motor Robot การประยุกต์ใช้ หุ่นยนต์, แขนกล, งานที่ต้องการควบคุมแรงบิดสูง
- แรงดัน DC12 – 24V
- Magnetic Encoder
- No load Current < 0.35A
- สัญญาณอินพุต DC0 – 5V
- Control accuracy 0.32°
- แรงบิดสูงสุด
- 24V at 110kg.cm (1078N.cm)
- 12V at 55kg.cm (539N.cm)
- ความเร็วเชิงมุม 24V (0.12s / 60°), 12V(0.24s / 60°)
- มุมการหมุน 300° สูงสุด (0-300°MAX, ปรับได้)
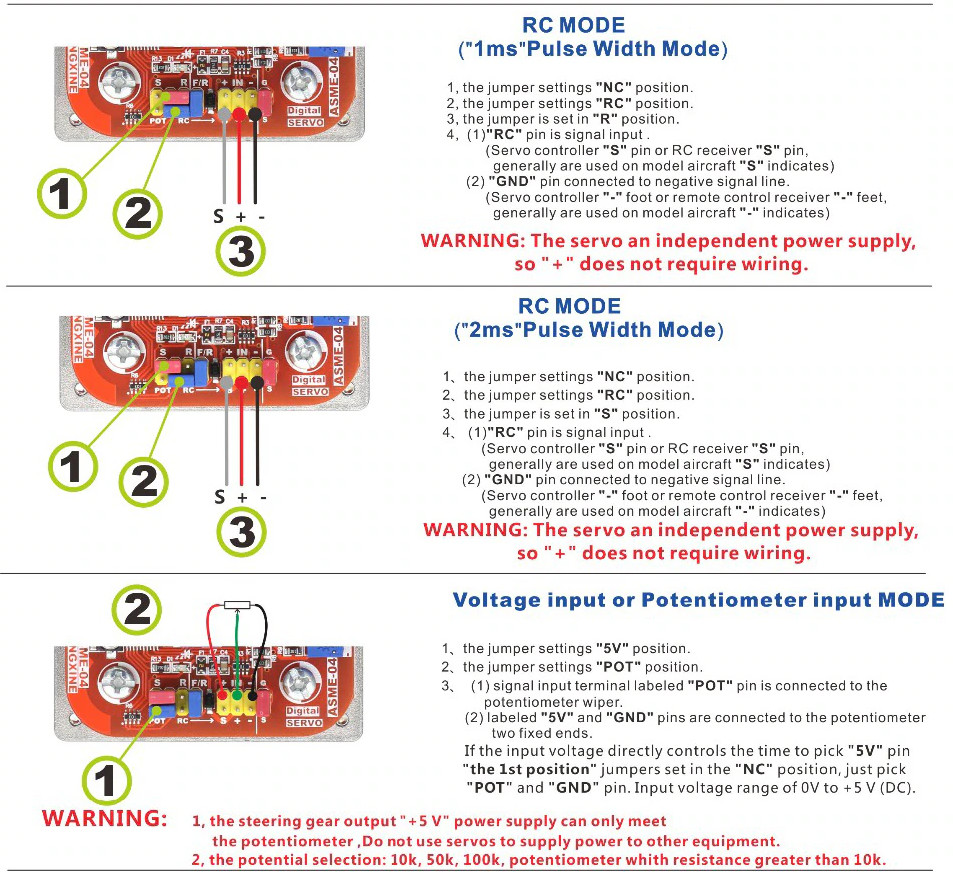
- โหมดอินพุทสัญญาณ Pulse / สัญญาณอนาล็อก (Potentiometer)
- Pulse 0.5ms – 2.5ms ช่วงอินพุทสัญญาณ
- Pulse 1ms – 2ms ช่วงอินพุทตัวควบคุมหลายช่องสัญญาณ สำหรับรีโมตคอนโทรลแบบไร้สาย, โปรแกรม SCM, Arduino ฯลฯ
- วัสดุเกียร์ เหล็ก
- ขนาดเพลาไดมิเตอร์ Dimeter shaft size 8 mm
- ขนาด 95.5 x 60.5 x 102.6 mm
ในชุดประกอบด้วย
- 1pcs x มอเตอร์ ดิจิตอลเซอร์โวมอเตอร์แรงบิดสูง Super Hi Torque Digital Servo Motor Robot
- 1pcs x สายสัญญาณ 3 Core
การควบคุม
1.การควบคุมดิจิตอลเซอร์โว RC MODE โดยใช้สัญญาณพัลส์ จาก MCU
- บอร์ดอาดูโน่ Arduino
- MCU Micro Controller ตระกูลอื่นๆที่มีการสร้างสัญญาณ PWM หรือมีช่องต่อ RC Servo
- หรือกล่องควบคุม เซอร์โว จาก รีโมทบังคับวิทยุระยะไกล 2.4GHz RC Transmitter Receiver
2.การควบคุมดิจิตอลเซอร์โวโดยใช้ตัวต้านทานปรับค่าได้ Potentiometer
Dimension

อุปกรณ์ที่สามารถใช้ร่วมกันได้
- CSRF08 คัปปลิ้ง ข้อต่อเพลา ข้อต่อหน้าแปลน Rigid Flange Coupling Shaft 8mm
- CSRF08 คัปปลิ้ง ข้อต่อเพลา ข้อต่อหน้าแปลน Rigid Flange Coupling Shaft 8mm
ตัวอย่าง Code การควบคุมดิจิตอลเซอร์โวโดยใช้ PWM



รีวิว
ยังไม่มีบทวิจารณ์