
คำอธิบาย
กริปเปอร์ Gripper มือจับหุ่นยนต์ Robot Finger ประยุกต์ใช้กับแขนหุ่นยนต์จับขวด BigClaw LDX-335 servo
ข้อมูลกริปเปอร์ Gripper
- วัสดุ อลูมิเนียมอัลลอย
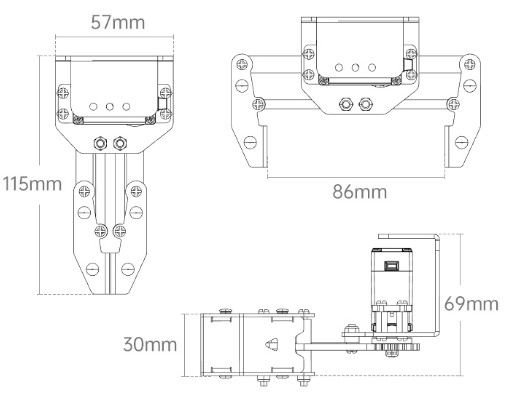
- กริปเปอร์ Gripper Finger อ้ากว้าง 86 mm
- Finger 2
- การควบคุม ใช้กับ Servo Motor ควบคุม ความกว้างของพัลส์ PWM
- หยิบงานได้ขนาด Diameter 80mm
มีอะไรเตรียมไว้ให้ในชุด
- 1set x กริปเปอร์ Gripper มือจับหุ่นยนต์ Robot Finger
- 1pcs x เซอร์โวมอเตอร์ แรงบิดสูง Digital High Torque RC Servo Motor LDX-335 Claws (including LDX-335 servos)
ข้อมูล Servo Motor
- แรงดัน 4.8 – 6.0 V
- ความเร็วทำงาน (4.8V) 0.23 วินาที / 60 องศา (No Load)
- ความเร็วทำงาน (6.0V) 0.19 วินาที / 60 องศา (No Load)
- แรงบิด (4.8V) / (3.2kg.cm)
- แรงบิด (6.0V) / (4.1kg.cm)
Dimension
- หยิบงานได้ขนาด Diameter 80mm

กริปเปอร์ไฟฟ้า มือจับหุ่นยนต์ Robot Finger Gripper C+RC Servo motor
ตัวอย่าง Code ทดสอบ Gripper ใช้ Arduino
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 90; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
//myservo.write(90); //ปล่อย
//myservo.write(155); //จับ
for (pos = 90; pos <= 155; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 90; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
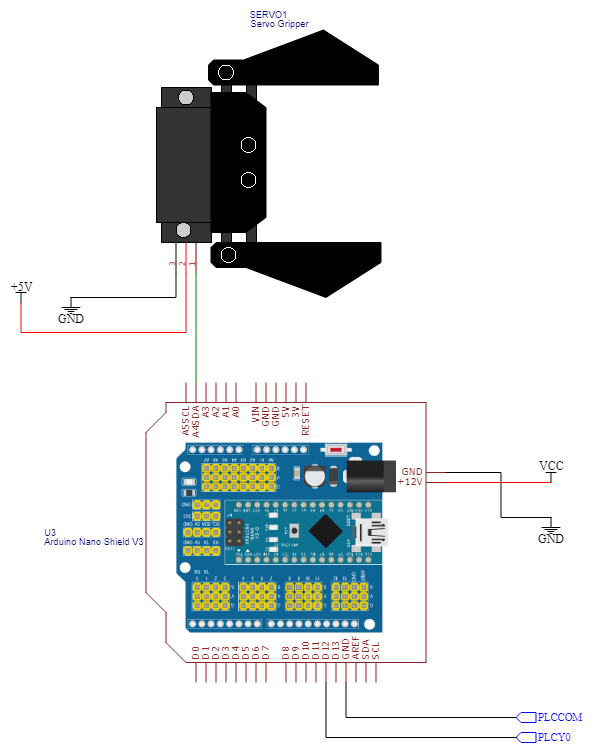
ตัวอย่าง Code ทดสอบ Gripper ใช้ Arduino รวมกับ PLC
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int pos = 0; // variable to store the servo position
int gripper_Open = 90;
int gripper_Close = 175;
const int buttonPin = 2; // the number of the pushbutton pin
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
// initialize the pushbutton pin as an input:
pinMode(2, INPUT_PULLUP);
myservo.attach(A4); // attach servo pin
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed. If it is, the buttonState is HIGH:
if (buttonState == HIGH)
{
if (pos > gripper_Open)
{
for (pos = gripper_Close; pos >= gripper_Open; pos += 1) {
//
myservo.write(pos);
delay(15);
}
}
}
else
{
if (pos < gripper_Close)
{
for (pos = gripper_Open; pos <= gripper_Close; pos += 1) {
//
myservo.write(pos);
delay(15);
}
}
}
}




รีวิว
ยังไม่มีบทวิจารณ์