
คำอธิบาย
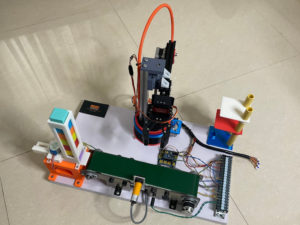
ชุดเรียนรู้+ชุดทดลองระบบอัตโนมัติแขนกล Robot arm Automation PLC
- เรียนรู้การใช้งาน PLC ควบคุมแขนกล ใช้สเต็ปปิ้งมอเตอร์
- เข้าใจขั้นตอนการควบคุม Stepping Motor ด้วย PLC, การ Homing
- การควบคุม Position โดยการจ่ายสัญญาณพัลส์ ด้วย PLC
- การเขียนแลดเดอร์ไดอะแกรมควบคุมแขนกล Step by Step โดยใช้คำสั่ง STL
กำหนดอินพุต
- X15 สวิตช์ Start
- X1 ลิมิตสวิตช์ แกน 1, X Motor มอเตอร์ ฐานหมุน หมุนตามเข็ม – หมุนทวนเข็ม
- X1 ลิมิตสวิตช์ แกน 2, Z Motor มอเตอร์ ยกแขน ขึ้น – ลง
- X2 ลิมิตสวิตช์ แกน 3, Y Motor มอเตอร์ เลื่อนแขน เข้า – ออก
กำหนดเอาต์พุต
Stepper Motor แกน 1 Axis
|
Stepper Motor แกน 2 Axis
|
Stepper Motor แกน 3 Axis
|
Y11 ปิด-เปิด Driver สเต็ปมอเตอร์ ป้องกันมอเตอร์ร้อน ตอนมอเตอร์หยุดหมุน
- SET Y11 Driver ON
- RST Y11 Driver OFF
Y10 เอาต์พุตไปสั่ง ตัวปล่อยชิ้นงาน Loader Box
Y6 กริปเปอร์ Gripper
- SET Y6 คือ Gripper จับ
- RST Y6 คือ Gripper ปล่อย
Y7 สายพาน Conveyor
- SET Y7 คือ สายพาน Start
- RST Y7 คือ สายพานStop
ในชุดประกอบด้วย PLX002 = 1. IO Section
1. IO Section
- สายพานลำเลียง Mini Conveyor 30×06
- 3-Axis Robot Arm 3D Print
- 3 x Stepping Motor + Driver DM542
- Gripper Arm Torque (4.8V) 18.5kg.cm + Nano Controller
- Quick Terminal Block 20-36
- เครื่องจ่ายชิ้นงานทรงสี่เหลี่ยมอัตโนมัติ Automatic Dispenser Magazine Feeder 06 BOX DC24V
- เซนเซอร์ โฟโตอิเล็กทริกอินฟราเรด Infrared Photoelectric Sensor 30cm NPN-NO E3F-DS30C4
- Sensor Bracket
- Plastwood Base
- คู่มือการใช้งาน
Ladder Diagram
Wiring Diagram



รีวิว
ยังไม่มีบทวิจารณ์