คำอธิบาย
ชุดทดลองตรวจจับวัตถุบนสายพานลำเลียง Automation Detect Photoelectric Infrared Sensor Relay
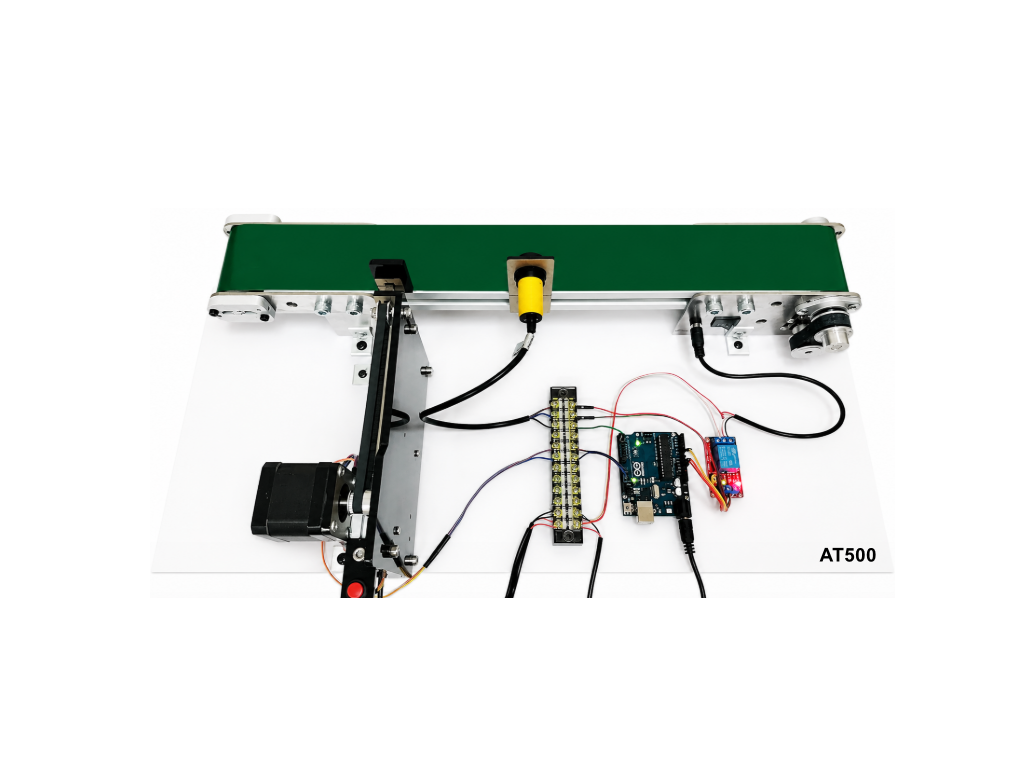
ชุดทดลองตรวจจับวัตถุบนสายพานลำเลียง
Automation Detect Photoelectric Infrared Sensor Relay
ชุดทดลองระบบอัตโนมัติสำหรับตรวจจับวัตถุบนสายพานลำเลียง ใช้เซนเซอร์ Photoelectric Infrared Sensor ร่วมกับ Relay เพื่อจำลองการตรวจจับและควบคุมอุปกรณ์ในระบบ Automation
ระบบอัตโนมัติประกอบด้วยส่วนหลัก ได้แก่
- อินพุต: เซนเซอร์ต่างๆ เช่น Pressure Sensor, Ultrasonic Sensor, Humidity Sensor, Gas Sensor, PIR Motion Sensor, Acceleration Sensor, Force Sensor, Color Sensor และ Gyro Sensor
- การสื่อสาร: USB, RS485, WiFi และสายสัญญาณอื่นๆ
- ตัวควบคุม: MCU หรือ Control System
- เอาต์พุต: วาล์ว มอเตอร์ หลอดไฟ ลำโพง และอุปกรณ์ควบคุมอื่นๆ
เหมาะสำหรับการเรียนรู้พื้นฐานระบบควบคุม ระบบแมคคาทรอนิกส์ หุ่นยนต์ และงาน Automation เบื้องต้น
ในชุดประกอบด้วย (อุปกรณ์ในชุดติดตั้งบนแผ่นพลาสวูด)
- 1pcs x สายพานลำเลียง Mini Conveyor DC
- 1pcs x ชุดผลักชิ้นงาน Rejector แบบใช้ Step motor
- 1pcs x บอร์ด Relay Module
- 1pcs x บอร์ด Arduino Uno
- 1pcs x เซนเซอร์แบบ Proximity Photoelectric ติดตั้งบนแผ่นเพลท
- 1pcs x ชุด สายไฟ Cable DC
- 1pcs x CNT112 คอนเนคเตอร์ เทอร์มินอลไฟฟ้า Screw Terminal Block 12CH TB1512 15A/600V
- 1pcs x อุปกรณ์ติดตั้งฐาน Plastwood
- 1pcs x Plastic Box กล่องกระบะพลาสติก
การใช้ Photoelectric Sensor ตรวจจับชิ้นงาน
Photoelectric Sensor เป็นเซนเซอร์สำหรับตรวจจับวัตถุแบบไม่สัมผัส โดยอาศัยหลักการส่งและรับแสงสะท้อนจากวัตถุ ระยะการตรวจจับขึ้นอยู่กับรุ่นของเซนเซอร์ โดยทั่วไปสามารถตรวจจับได้ประมาณ 3–80 เซนติเมตร เซนเซอร์ชนิดนี้สามารถตรวจจับวัตถุได้หลากหลายประเภท เช่น พลาสติก โลหะ กระดาษ ไม้ และวัสดุทั่วไป จึงนิยมใช้งานในระบบสายพานลำเลียง เครื่องจักรอัตโนมัติ และระบบคัดแยกชิ้นงาน
การต่อสายไฟ
- สายสีน้ำตาล (Brown) : +VCC (DC Power Supply)
- สายสีน้ำเงิน (Blue) : GND (0V)
- สายสีดำ (Black) : Digital Output (NPN NO Normally Open)
หลักการทำงาน
- เมื่อไม่มีวัตถุอยู่ในระยะตรวจจับ ขา Output จะอยู่ในสถานะ OFF
- เมื่อมีวัตถุเข้ามาในระยะตรวจจับ เซนเซอร์จะทำงานและส่งสัญญาณ Output แบบ NPN Active Low ทำให้สามารถนำสัญญาณไปควบคุม Relay, PLC, Arduino หรือไมโครคอนโทรลเลอร์อื่น ๆ ได้
Wiring Diagram
Arduino Code
const int Sensor1 = 2; // ต่อเซนเซอร์ตัวที่ 1
const int Reject1 = 4; // สั่งตัวผลักชิ้นงาน
const int Relay_1 = 8; // สั่ง Relay_1 active low
//เมื่อเซนเซอร์เจอชิ้นงาน จะหน่วงเวลาให้ชิ้นงานเคลื่อนที่ถึงตัวผลัก แล้วสั่งให้ตัวผลักทำงาน
int Sensor1_State; // the current reading from the input pin
int lastButton_State = LOW; // the previous reading from the input pin
unsigned long lastDebounceTime = 0; // the last time the output pin was toggled
unsigned long debounceDelay = 50; // the debounce time; increase if the output flickers
void setup() {
pinMode(Sensor1, INPUT_PULLUP);
pinMode(Reject1, OUTPUT);
pinMode(Relay_1, OUTPUT);
// set initial state
digitalWrite(Reject1, HIGH);
Serial.begin(9600);
}
void loop() { // read the state of the switch into a local variable:
digitalWrite(Relay_1, LOW); // สั่งให้รีเลย์ทำงานจ่ายไฟให้สายไฟหมุน
int reading1 = digitalRead(Sensor1); // อ่านค่าจากเซนเซอร์
if (reading1 != lastButton_State) { // reset the debouncing timer
lastDebounceTime = millis();
Serial.println(reading1);
}
if ((millis() - lastDebounceTime) > debounceDelay) //หน่วงเวลาป้องกันสัญญาณรบกวน คือต้องมีค่าเวลามากกว่าตัวแปร debounceDelay เพื่อให้แน่ใจว่ามีชิ้นงานจริงๆ ไม่ใช่สัญญาณรบกวน
{
if (reading1 != Sensor1_State)
{
Sensor1_State = reading1;
if (Sensor1_State == LOW) // ยืนยันว่าเซนเซอร์ตรวจจับชิ้นงานได้จริงๆ เป็น Active Low
{
delay(700); // หน่วงเวลา 500 = 1/2 s, 1000 = 1s, 2000 = 2s ให้ชิ้นงานเคลื่อนไปถึงตัวผลัก
digitalWrite(Reject1, LOW); // สั่งให้ตัวผลักชิ้นงานทำงาน
delay(50); // หน่วงเวลาสักครู่
digitalWrite(Reject1, HIGH); // กลับมาสถานะเดิม
}
}
}
lastButton_State = reading1;
}
ดาวน์โหลด


รีวิว
ยังไม่มีบทวิจารณ์