
คำอธิบาย
ซอร์โวมอเตอร์ RC Servo Motor MG946
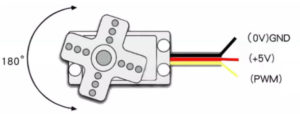
- 0-180 degrees
- Operation Voltage 4.8 – 7.2Volts
- สัญญาณอินพุต 0 – 5VDC
- Pulse 0.5ms – 2.5ms ช่วงอินพุทสัญญาณ
- Stall Torque 13 kg-cm (180.5 oz-in) at 4.8V
- Stall Torque 15 kg-cm (208.3 oz-in) at 6.0V
- Operating Speed 0.17sec / 60 degrees (4.8V no load)
- Operating Speed 0.13sec / 60 degrees (6.0V no load)
- Connector Wire Length 300mm
- ขนาด 40mm x 19mm x 43mm
Wiring Diagram
การประยุกต์ใช้
- หุ่นยนต์, แขนกล, งานที่ต้องการควบคุมแรงบิดสูง
ตัวอย่าง Code การควบคุมดิจิตอลเซอร์โวโดยใช้ PWM
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 150; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 150; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
พารามิเตอร์ทั้ง 4 ของ MG995 / MG996 /MG945 / MG946 ขนาดเหมือนกัน แต่มีความแตกต่างอยู่ที่ความเร็วในการใช้งาน แรงบิด ความแม่นยำ
- MG995 มีความเร็วมาก แต่แรงบิดต่ำ
- MG996 มีความเร็วน้อย แต่มีแรงบิดสูง
- MG945 มีความเร็วปานกลาง และแรงบิดปานกลาง
- MG946 มีความเร็วปานกลาง และแรงบิดปานกลาง ค่อนข้างเสถียร



รีวิว
ยังไม่มีบทวิจารณ์