
คำอธิบาย
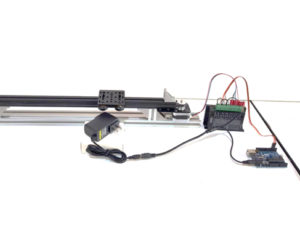
ชุดรางเลื่อนสไลด์ สายพานไทม์มิ่งขับ Linear Slide rail Set Timing Belt Drive 2GT-400 Stepper Motor Nema17 (42mm)
- Stepper Motor (NEMA17 42mm)
- Accuracy Positioning 0.26mm
- Max Force 0.28Nm
- Max Speed 5000mm/min
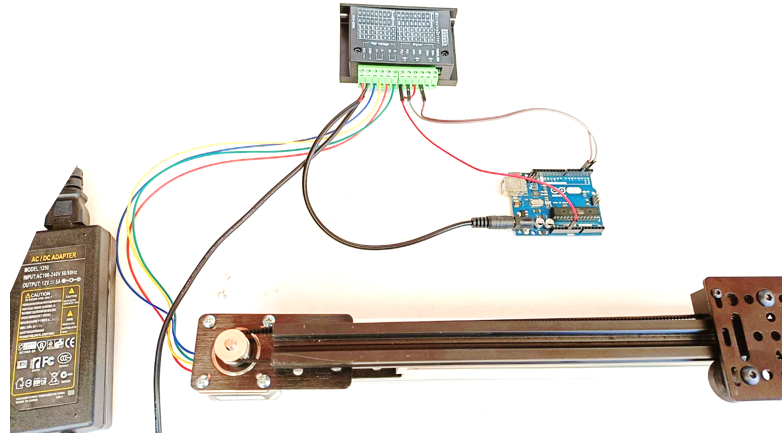
ในชุดประกอบด้วย
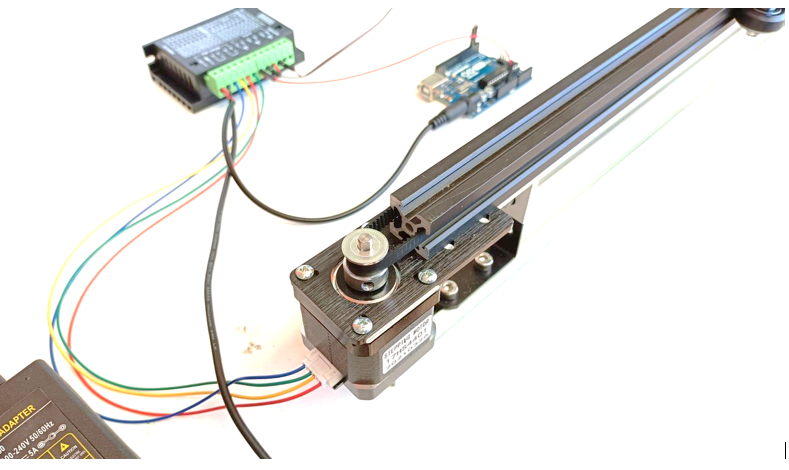
- 1 Set x ชุด อุปกรณ์แมคคานิค Linear Slide Actuator Drive Timing Belt
- 1 pcs x MT1713 สเต็ปเปอร์มอเตอร์ Stepper Motor Nema17-34mm-0.28Nm-17HS3401S
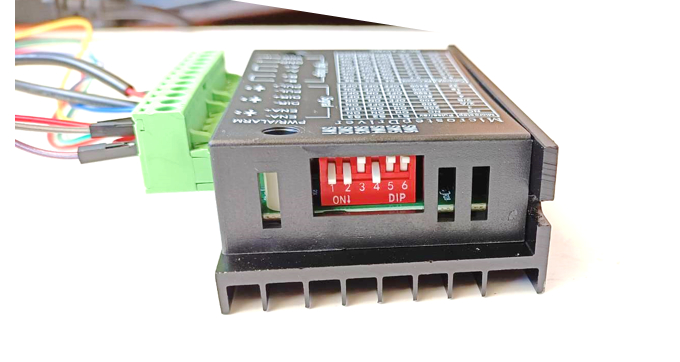
- 1 pcs x DMST06 ไดรเวอร์ สเต็ปเปอร์มอเตอร์ Driver Stepper Motor DC9-42V/4A TB6600
- 1 pcs x Arduino Uno R3 Compatible
- 1 pcs x Adaptor DC12V
- 1 pcs x CB0003 สายไฟ Cable DC Jack 5.5×2.1mm-30cm-Female
- 1 pcs x CB0004 สายไฟ Cable DC Jack 5.5×2.1mm-30cm-Male
- 1 Set x Wiring Jumper
ชุด อุปกรณ์แมคคานิค Set Linear Slide Actuator Drive Timing Belt ประกอบด้วย
- 1pcs x ฐานอลูมิเนียมโปรไฟล์ T Slot 2080 50cm
- 1pcs x อลูมิเนียมโปรไฟล์ Slot 2020 50cm
- 4pcs x อลูมิเนียมโปรไฟล์ Bracket 2020
- 1pcs x GT2201 แผ่นประกอบรางสไลด์อลูมิเนียม Gantry Plate 2020V-Slot 2020 3Wheel Kit Set
- 1pcs x ALID01 แผ่นลูกรอกไอเดลอร์ Nema17 Aluminum Idler Pulley Plate
- 1pcs x BKMT41 ฉากยึดมอเตอร์ Nema17 Stepper Motor Mounting Bracket Plate I 42mm 39.5x82mm
- 3pcs x Screw M5x20
- 10pcs x Screw M5x8
- 10pcs x T Nut 2020 M5
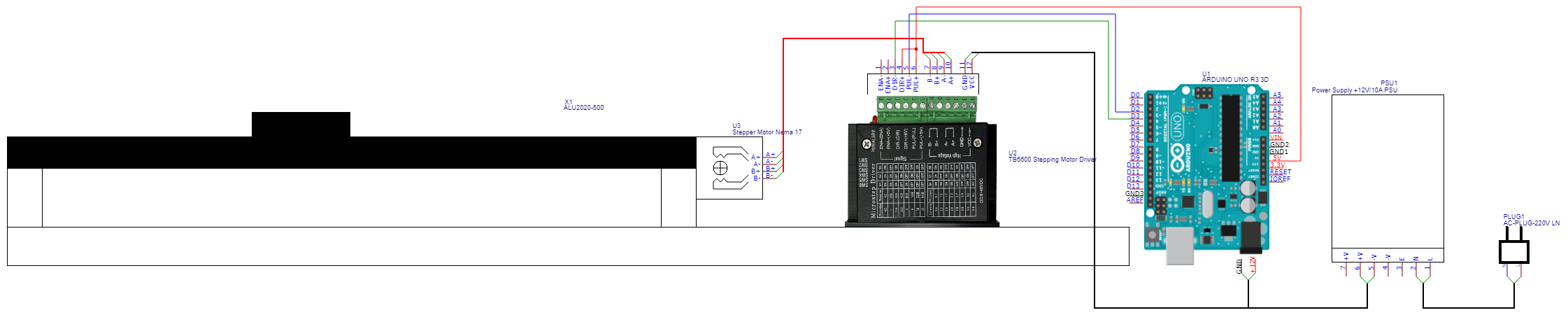
Wiring Diagram
Arduino Code
#include <AccelStepper.h>
// The X Stepper pins
#define STEPPER1_DIR_PIN 3
#define STEPPER1_STEP_PIN 2
AccelStepper stepper(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN);
void setup()
{
stepper.setMaxSpeed(3000.0); // ทดลองปรับความเร็ว
stepper.setAcceleration(30000.0); // ทดลองปรับความเร่ง
}
void loop()
{
stepper.runToNewPosition(0);
delay(1000);
stepper.runToNewPosition(500);
delay(1000);
stepper.runToNewPosition(0);
delay(1000);
stepper.runToNewPosition(-500);
delay(1000);
}



รีวิว
ยังไม่มีบทวิจารณ์