
คำอธิบาย
หุ่นยนต์เพื่อการศึกษา หุ่นยนต์ แขนกลเพื่อการศึกษา Education Robot Arm DOFBOT
- Al visual identity | ROS system | Inverse kinematics
- บทช่วยสอนและโค้ด Yahboom ช่วยให้ควบคุมแขนหุ่นยนต์นี้ได้อย่างง่ายดาย
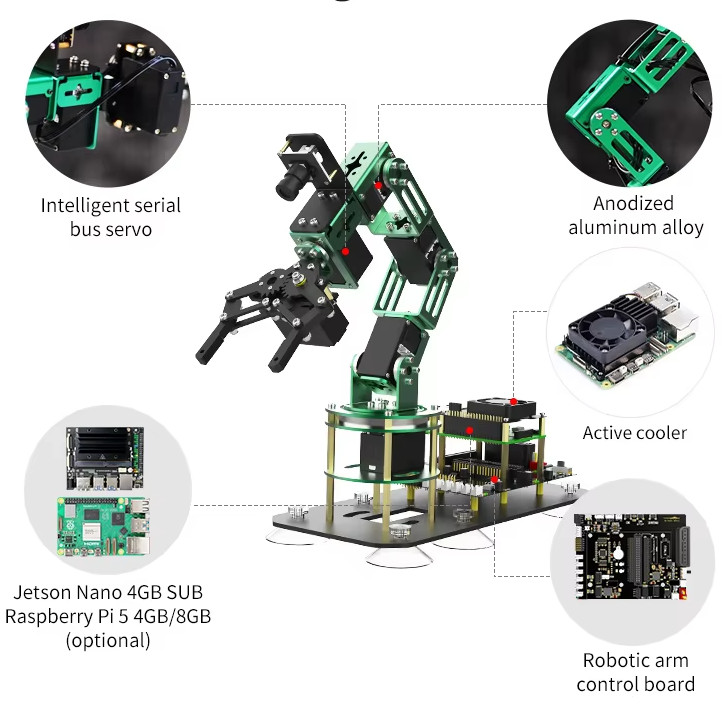
DOFBOT คือหุ่นยนต์แขนกลเพื่อการศึกษา เหมาะสำหรับผู้เริ่มต้นด้าน AI, คนที่ชอบเขียนโปรแกรม และแฟน ๆ Jetson Nano ออกแบบมาให้ใช้งานกับ Jetson Nano 4GB SUB และ Raspberry Pi 5 ตัวเครื่องผลิตจากอลูมิเนียมชุบเขียว แข็งแรงและสวยงาม มาพร้อมกล้อง HD, เซอร์โวมอเตอร์คุณภาพสูง 6 ตัว และบอร์ดขยายอเนกประสงค์ รองรับฟังก์ชัน AI ด้านการมองเห็นมากมาย เช่น การติดตามสี ตรวจจับท่าทาง แยกขยะ และจดจำใบหน้า
คุณลักษณะทั่วไป
จุดเด่นหลัก
เริ่มต้นง่าย ใช้งานสะดวก
- ประกอบเสร็จจากโรงงาน ไม่ต้องประกอบเอง
- มีการ์ด TF พร้อมระบบติดตั้งไว้ล่วงหน้า
- สแกน QR ด้วยแอปมือถือเพื่อเชื่อม Wi-Fi ได้ทันที
- มีบทเรียนและโค้ดตัวอย่างครบในแต่ละฟังก์ชัน
โครงสร้างแข็งแรง
- ใช้โครงอลูมิเนียมหนา 2 มม.
- ฐานยึดด้วยจุ๊บสุญญากาศ วางได้มั่นคงทุกพื้นผิว
- กล้องติดตั้งรวมกับแขนกลในตัว
- แขนกล 6 แกน เคลื่อนไหวได้อิสระ
ฮาร์ดแวร์ประสิทธิภาพสูง
- Degrees of Freedom (DOF): 5 DOF + Gripper (กริปเปอร์นับเป็น 1 แกนเพิ่ม)
- น้ำหนักบรรทุก (Payload):
-
- เมื่อแขนยืดออกเต็มที่: รองรับได้ 200 กรัม
- น้ำหนักจับ/ยึดวัตถุในแนวตั้งหรือใกล้ฐาน: รองรับได้ 500 กรัม
- ใช้เซอร์โวบัส 15Kg จำนวน 5 ตัว และ 6Kg 1 ตัว
- บอร์ดขยายรองรับ Jetson Nano, Raspberry Pi, Arduino, Microbit
- มีพอร์ตเชื่อมต่อสำหรับจอย PS2, โมดูล Wi-Fi/Bluetooth, และ I2C
ฟังก์ชัน AI
- ควบคุมผ่านมือถือ Android/iOS, คอมพิวเตอร์, จอยเกม หรือ Jupyter Lab
- รองรับการสร้างท่าทางและโปรแกรมเคลื่อนไหวเอง
- แขนกล 2 ข้างทำงานพร้อมกันได้
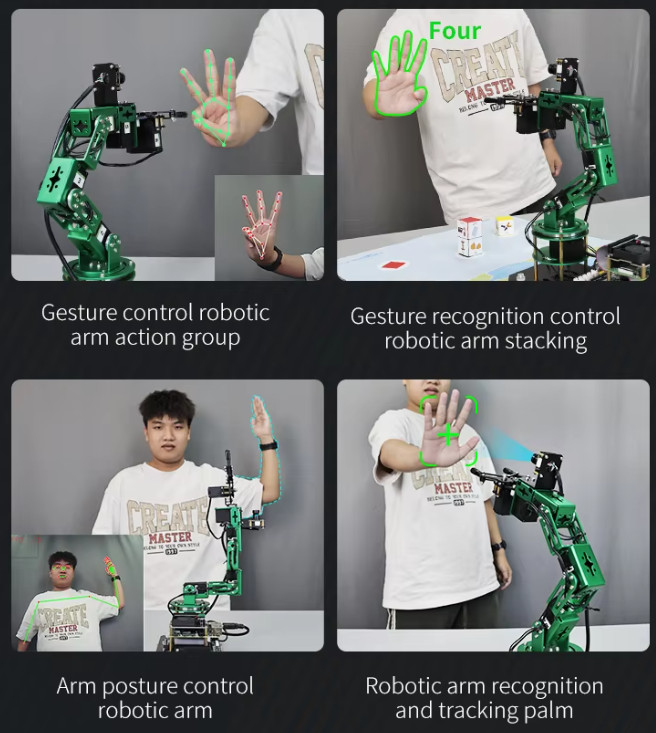
- ฟังก์ชัน AI ที่รองรับ:
- ตรวจจับท่าทางมือ
- ติดตามสีและตอบสนองกับสี
- แยกประเภทขยะ
- ติดตามใบหน้า
- จับสิ่งของและเรียงบล็อก
เหมาะสำหรับ
- สถาบันการศึกษา ด้าน AI และ STEM
- ห้องเรียนหุ่นยนต์
- ผู้สนใจเรียนรู้ระบบหุ่นยนต์และ AI
ในชุดประกอบด้วย
- 1set x Robotic Arm 6 Axis
- 1set x AI Vision Camera
- 1set x Raspberry Pi5 4GB

MediaPipe Machine Learning
ROS operating system
It is a collection of tools, libraries, and protocols designed to simplify robotics platforms and build complex and powerful robots.
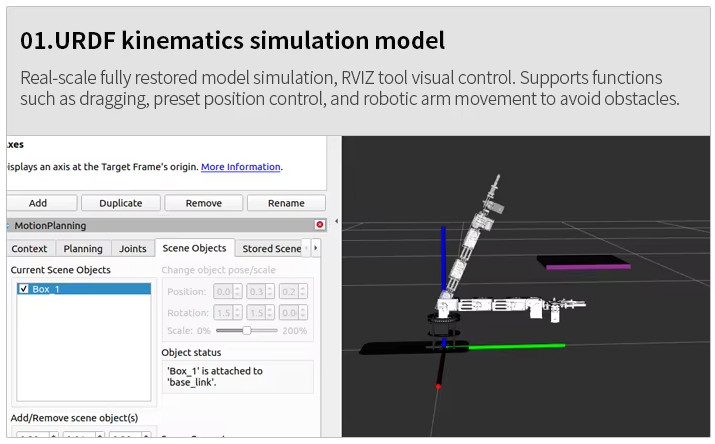
Inverse kinematics algorithm
Decompose the movement of the six servos of the robotic arm, calculate the theoretical angle at which each servo needs to move by inputting the target coordinates, and then combine it with the servo control protocol to simultaneously control the movement of each servo.
Robotic arm Movelt control
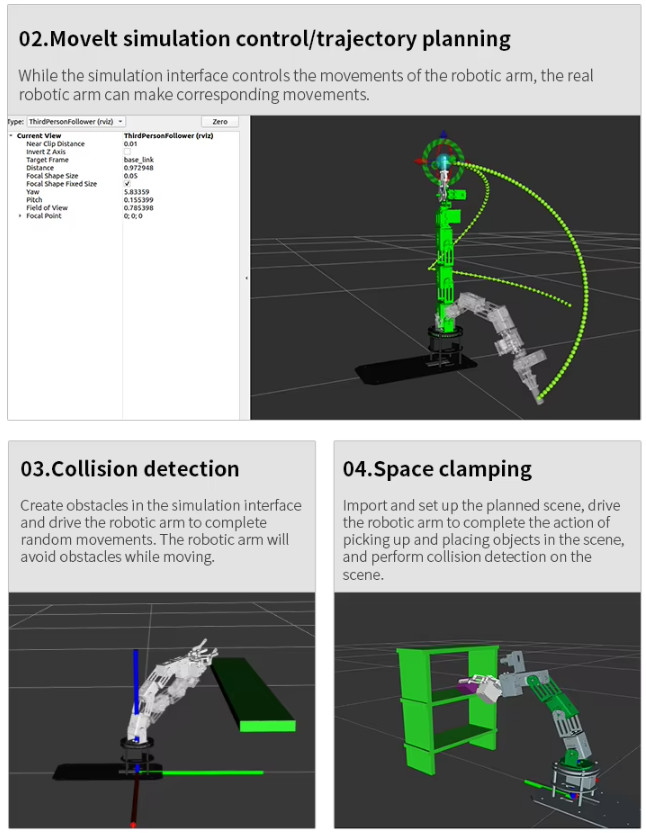
Robot Motion Control

Cross-platform interconnection control
Multifunctional mobile APP (IOS/Android)
Built-in a variety of Al function, you can watch the robotic arm recognition screen in real time and support gesture interaction, mobile tracking, garbage sorting.

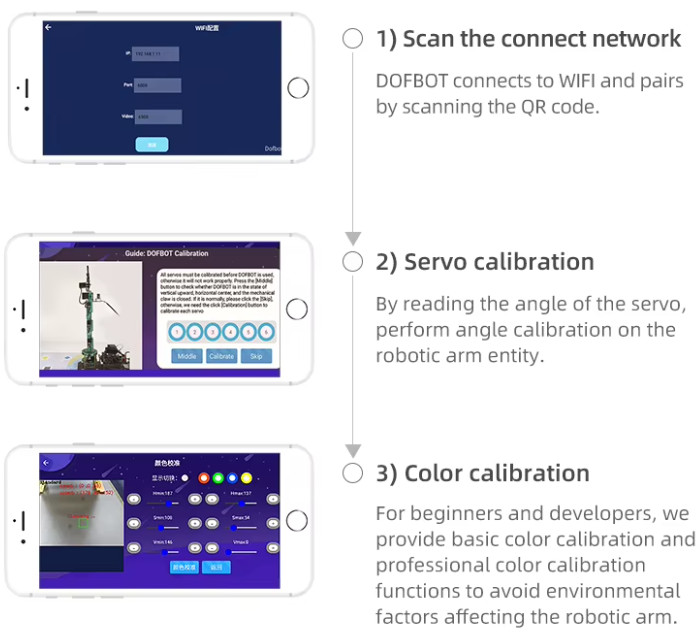
Guided quick start
Guided teaching, follow the APP in three steps to get started
Open Python Source Code
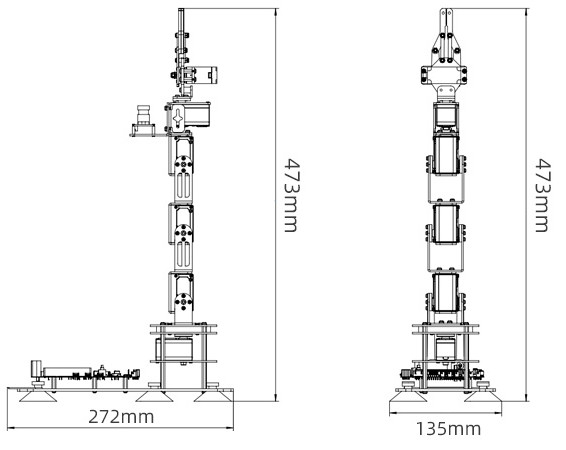
Dimension
Online course Tutorial link
- DOFBOT-JetsonNANO http://www.yahboom.net/study/Dofbot-Jetson_nano
- DOFBOT-Pi http://www.yahboom.net/study/Dofbot-Pi
ตารางเปรียบเทียบระหว่าง DOFBOT ตัวสีเขียว และ DOFBOT SE ตัวสีขาว
| รายการ | DOFBOT ตัวสีเขียว | DOFBOT SE ตัวสีขาว |
|---|---|---|
| Master Control | Raspberry Pi / Jetson Nano B01 | Virtual Machine |
| Repeatable Accuracy | ±0.5 mm | ±0.5 mm |
| Degree of Freedom | 6 แกน | 6 แกน |
| Arm Span | 350 mm | 350 mm |
| Gripper Open-Close Angle | 6 cm | 6 cm |
| Structure Type | Traditional robotic arm structure | Traditional robotic arm structure |
| Camera | USB HD camera | USB HD camera |
| Visual Dimension | Plane 2D image | Plane 2D image |
| Display | / | / |
| Function | Interconnection control, MoveIt motion planning, Rviz robot simulation, 2D visual interaction |
Interconnection control, MoveIt motion planning, Rviz robot simulation, 2D visual interaction |
| Positioning | Raspberry Pi / Jetson Nano Entry-level visual robotic arm |
Virtual Machine version Entry-level visual robotic arm |
ข้อพิจารณา:
- หากต้องการใช้งาน ภายนอก (standalone) โดยไม่พึ่งพาเครื่องคอมพิวเตอร์หลักมากนัก → DOFBOT (เพราะใช้ Raspberry Pi หรือ Jetson Nano ควบคุมได้โดยตรง)
- หากต้องการใช้งานผ่าน เครื่องคอมพิวเตอร์หรือ Virtual Machine → DOFBOT SE



รีวิว
ยังไม่มีบทวิจารณ์