-
×
 BC0002 โมดูลสแกนอ่านบาร์โค้ด Barcode Scanner 1D 2D QR Code Module MH TTL+USB รองรับ Arduino IDE
BC0002 โมดูลสแกนอ่านบาร์โค้ด Barcode Scanner 1D 2D QR Code Module MH TTL+USB รองรับ Arduino IDE สั่งจองสินค้าได้
1 × ฿970.00
รวม: ฿970.00


LabVIEW 2018 เหมาะสำหรับใช้งาน
LabVIEW NXG เหมาะสำหรับใช้งาน
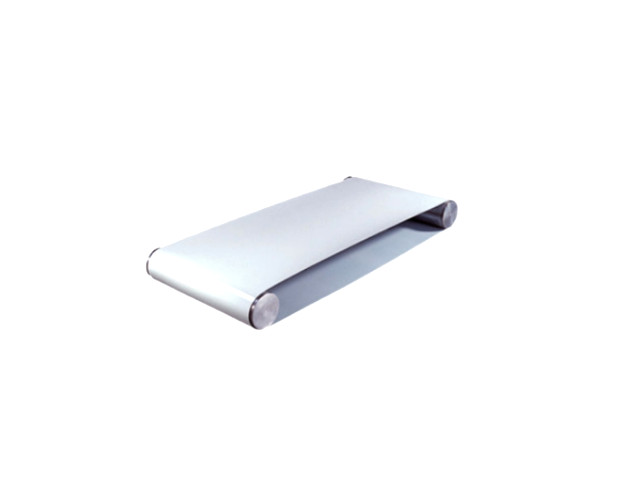
เราสามารถ คำนวณเส้นรอบวงสายพาน ด้วยสมการคณิตศาสตร์อย่างง่าย นั่นคือการหาเส้นรอบวง โดยเราจำเป็นต้องทราบ ความยาวสายพานลำเลียง และรัศมีของโรลเลอร์ r ที่เราใช้เสียก่อน
ตัวอย่าง
ความยาวสายพานลำเลียงขนาด 300mm มีรัศมีของโรลเลอร์ r = 15mm
หาเส้นรอบวงโรลเลอร์ โดยใช้ 2 x pi x r
ซึ่งจะได้เส้นรอบวง 94.2mm และครึ่งของเส้นรอบวงคือ 47.1mm
หาความยาวเพลาถึงเพลา
จากการทราบ ความยาวสายพานลำเลียง ลบกับ รัศมีของโรลเลอร์ x 2
ความยาวเพลาถึงเพลา = 300mm – (15mm x 2)
ความยาวเพลาถึงเพลา = 270mm
จากนั้นหาเส้นรอบวงสายพานลำเลียง
โดยการรวมความยาวระยะต่างๆดังนี้
เส้นรอบวงสายพานลำเลียง = ความยาวเพลาถึงเพลา + ความยาวเพลาถึงเพลา + ความยาวครึ่งวงโรลเลอร์ + ความยาวครึ่งวงโรลเลอร์
270mm + 270mm + 47.1mm + 47.1mm = 634mm
เราอาจจะเผื่อค่าความหย่อนตัวของสายพานสักเล็กน้อยประมาณ 1.5 – 2.5% ก็ได้
จะได้ค่าเส้นรอบวงสายพานลำเลียงที่เผื่อหย่อนประมาณ 650mm เป็นต้น
ระบบ Push Rejector
ใช้ระบบที่ใช้คัดแยกชิ้นงาน ในงานผลิต NG “No Good” หมายถึงชิ้นงานที่ไม่ดี ซึ่งอาจจะหมายถึงชิ้นงานที่ไม่เข้าเกณฑ์ หรือ สินค้าที่มีข้อบกพร่อง จึงต้องทำการคัดแยกชิ้นงานนั้นออกไป อุปกรณ์ที่ใช้คัดแยกหรือนำพาชิ้นงานนั้นออกไปจากการผลิต เราเรียกว่า Rejector, Pusher Type Rejector เป็น Rejector ประเภทดันหรือผลัก ชิ้นงานที่ NG จะถูกถูกดันออกข้างต้วยตัว Rejector
รับซ่อมบอร์ดแผงวงจรอิเล็กทรอนิกส์
รับตัดต่อสายพานลำเลียงขนาดเล็ก
Mixly
การเขียนโปรแกรมแบบลากและวางสำหรับบอร์ด Microduino และ Arduino Mixly มาแนวทางเดียวกับ Blockly แพลตฟอร์ม Mixly พัฒนาขึ้นโดย Mixly Team @ Bejing Normal University.
Blocks
Color sensors เซนเซอร์สี Light-to-Digital
การใช้งาน การตรวจสอบสีของผลิตภัณฑ์ ระบบอัตโนมัติอุตสาหกรรม Industrial automation
TCS3472 ประกอบด้วยอาร์เรย์ photodiode 3 × 4, ประกอบด้วยโฟโตไดโอดที่กรอง
การสื่อสาร I²C 7-bit address 0x29 Compatible with 3.3V and 5V logic level
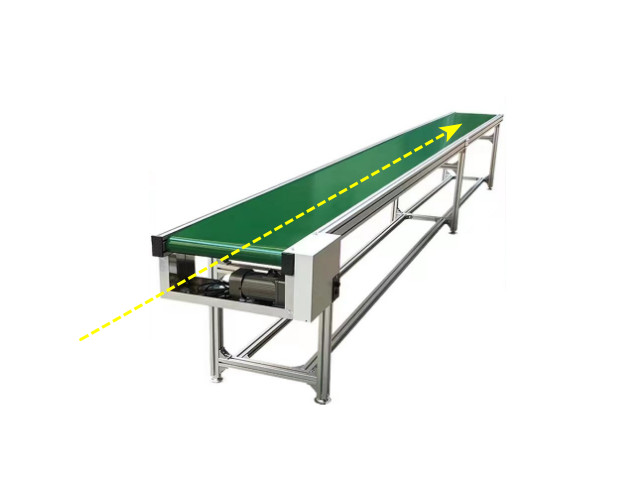
วิธีการคำนวณความเร็วของสายพานลำเลียง วัดเส้นผ่านศูนย์กลางของลูกกลิ้งที่สายพานลำเลียงพันรอบ
ตัวอย่าง
ความเร็วของสายพาน = (80 x 1 x 0.262) / 3.33
ความเร็วของสายพาน = 6.29 ฟุต/นาที หรือประมาณ 1.92 เมตร/นาที
Reference :
Grid-EYE คืออะไร
เทคโนโลยีการที่ภาพความร้อน แต่ Grid-EYE AMG8853 เป็นเซ็นเซอร์ ตรวจจับอุณหภูมิ จากพานาโซนิค สามารถใช้ในงานต้นแบบกล้องถ่ายภาพความร้อนขนาดกะทัดรัด
เซ็นเซอร์ AMG8853
5.0 V.DC High performance type High gain
Horizontal viewing angle 60°
เป็นเซ็นเซอร์วัดอุณหภูมิแบบอาร์เรย์ ขาด 8 x 8 (64 Pixel) สามารถตรวจจับความเคลื่อนไหวคนได้ไกลถึง 7 เมตร (23 ฟุต) ช่วงวัดอุณหภูมิ: 0 ° C ถึง 80 ° C (32 ° F ถึง 176 ° F) ความถูกต้อง + – 2.5 ° C อัตราเฟรมสูงสุด 10Hz เหมาะสำหรับการสร้างเครื่องตรวจจับความเคลื่อนไหวคน หรือกล้องถ่ายภาพความร้อนขนาดเล็ก (mini thermal camera) การตรวจหาจุดร้อน การควบคุมความปลอดภัยและแสงสว่าง การควบคุมและการประหยัดพลังงานในอาคาร
การต่อวงจร
Prototype
เซ็นเซอร์สื่อสารผ่าน I2C Power supply : 5V AMG8853 เชื่อมต่อกับไมโครคอนโทรลเลอร์ จำพวก Arduino, Raspberry ได้เลย เซ็นเซอร์ AMG8853 จะส่งการอ่านค่าอุณหภูมิอินฟราเรดแต่ละชุดผ่าน 64 Pixel
Arduino Code
http://trac.switch-science.com/wiki/AMG88
Processing Code
http://trac.switch-science.com/wiki/AMG88
อ้างอิง
ก่อนอื่นต้องทำความเข้าใจกันก่อนว่าเซอร์โวมอเตอร์ที่เรากล่าวถึงนี้เป็นแบบที่ใช้ในอุปกรณ์วิทยุบังคับ ซึ่งมีชื่อเรียกเต็มว่า Radio Control Servo Motor หรือเรียกสั้นๆว่า RC servo ซึ่งมีลักษณะดังรูปที่16 โดยตัวเซอร์โวนี้จะมีแกนที่หมุนได้ การควบคุมการหมุนของแกนเซอร์โวนี้ทำได้โดยส่งสัญญาณตำแหน่งไปยังตัวเซอร์โว สัญญาณที่ว่านี้ต้องเป็นพัลส์รูปสี่เหลี่ยมที่มีความกว้างที่ สามารถเปลี่ยนแปลงได้ตั้งแต่1.0ถึง2.0มิลลิเซคขึ้นอยู่กับการควบคุมคันโยกที่ตัวบังคับวิทยุ เมื่อนำมาใช้กับอุปกรณ์วิทยุบังคับ สัญญาณพัลส์ที่ว่านี้จะถูกแปลงให้เป็นสัญญาณวิทยุส่งออกจากตัวส่งผ่านสายอากาศ ไปยังตัวรับที่อยู่ไกลออกไป ตัวรับจะแปลงสัญญาณที่อยู่ในรูปของคลื่นวิทยุให้เป็นสัญญาณพัลส์ที่ตัวเซอร์โวสามารถรับได้ ตัวเซอร์โวเมื่อได้รับสัญญาณก็จะหมุนไปตามตำแหน่งซึ่งจะเป็นสัดส่วนโดยตรงกับสัญญาณพัลส์ที่ได้รับ กระบวนการทั้งหมดที่กล่าวมานี้เกิดขึ้นอย่างรวดเร็วและต่องเนื่องจนทำให้เรารู้สึกว่าสามารถควบคุมเซอร์โวได้อย่างทันทีทันใดด้วยคันโยกที่ตัวส่ง
ภายในตัวเซอร์โวนั้นจะประกอบไปด้วยมอเตอร์ดีซีขนาดเล็ก เฟืองทด อุปกรณ์ควบคุมตำแหน่ง และวงจรอิเล็กทรอนิกส์สำหรับแปลงสัญญาณและขับมอเตอร์ ดังนั้นเมื่อเราใช้เซอร์โวมอเตอร์จึงไม่จำเป็นต้องสร้างหรือใช้อุปกรณ์อื่นใดในการต่อร่วมอีก
ความกว้างของพัลส์สำหรับควบคุมตำแหน่งเซอร์โวจะต้องถูกส่งซ้ำอีก50ถึง60ครั้งในหนึ่งวินาที ไม่เช่นนั้นเซอร์โวจะไม่สามารถรักษาตำแหน่งตามที่เราต้องการได้ ตัวเซอร์โวที่มีใช้ในอุปกรณ์ วิทยุบังคับ มีหลากหลายขนาดและขึ้นอยู่กับการเลือกใช้ ราคาของเซอร์โวขนาดมาตรฐานจะอยู่ในช่วง500ถึง700บาท แรงดันไฟที่จ่ายให้กับเซอร์โวมอเตอร์โดยปกติจะอยู่ที่4.8-5โวลต์ แต่เราสามารถใช้กับแรงดันที่สูงมากว่านี้ได้เล็กน้อยเช่น6-7.2โวลต์ซึ่งเซอร์โวก็ยังสามารถทำงานได้อยู่
ส่วนประกอบพื้นฐานของเซอร์โวมอเตอร์นั้นจะประกอบไปด้วยดีซีมอเตอร์ขนาดเล็ก เฟืองทด ที่มีอัตราทด180ต่อ1และวงจรอิเล็กทรอนิกส์ ด้วยอัตราทด180ต่อ1ทำให้เซอร์โวมอเตอร์มีแรงบิดสูงมากเมื่อเทียบกับขนาดของมัน ที่แกนหมุนของเซอร์โวนั้นปกติแล้วหมุนได้ประมาณ180องศาหรือมากกว่านั้นเล็กน้อย ที่แกนนี้ภายจะมีตัวต้านทานปรับค่าต่ออยู่โดยตรง มันทำหน้าที่ตรวจจับตำแหน่งของแกนอยู่ตลอดเวลาสัญญาณที่ได้จะส่งไปยังบอร์ดอิเล็กทรอนิกส์ เพื่อควบคุมมอเตอร์ให้หมุนแกนไปยังตำแหน่งที่ต้องการ
การควบคุมมอเตอร์ในลักษณะนี้เรียกว่าการควบคุมแบบป้อนกลับซึ่งนั้นเป็นที่มาของคำว่าเซอร์โวนั้นเอง ตัวควบคุมภายนอก(ในที่นี้หมายถึงไมโครคอนโทรลเลอร์หรือตัวเบสิกแสตมป์นั้นเอง)จะเป็นตัวบอกว่าจะให้เซอร์โวเคลื่อนที่ไปยังตำแหน่งใดด้วยสัญญาณที่เรียกว่า PPM ซึ่งย่อมาจาก pulse proportional modulation ซึ่งความกว้างของพัลส์ในสัญญาณลักษณะนี้ก็คือข้อมูลของตำแหน่งที่ต้องการให้เซอร์โวเคลื่อนที่ไป สัญญาณลักษณะนี้มักถูกเข้าใจผิดอยู่บ่อยๆว่าเป็นสัญญาณแบบPWM (pulse width modulation)เนื่องจากลักษณะจะคล้ายๆกัน แต่เพื่อให้เข้าใจถูกต้องความแตกต่างของสัญญาณทั้งสองแบบนี้คือ PWM จะเป็นการปรับดิวตี้ไซเคิลของพัลส์ระหว่างสัญญาณ0และ1ได้ตั้งแต่0ถึง100เปอร์เซนต์ในหนึ่งคาบเวลา โดยส่วนใหญ่จะสัญญาณPWMนี้นำไปควบคุมความเร็วของมอเตอร์โดยสามารถควบคุมได้ตั้งแต่0ถึง100เปอร์เซนต์ ส่วนสัญญาณPPMนี้จะใช้สัญญาณพัลส์ที่เปลี่ยนแปลงได้ในระหว่าง 1-2 มิลลิวินาที จากช่วงเวลา20มิลลิวินาทีเท่านั้นเพื่อเข้ารหัสข้อมูลที่ต้องการ ซึ่งในที่นี้เป็นข้อมูลของตำแหน่งที่ต้องการให้เซอร์โวหมุนไป ในรูปที่17แสดงให้เห็นถึงความแตกต่างระหว่างสัญญาณPPM และสัญญาณPWM จากรูปจะเห็นว่าสัญญาณอาจจะคล้ายๆกันแต่การเปลี่ยนแปลงความกว้างของพัลส์ทำได้แตกต่างกัน PPMจะเปลี่ยนแปลงความกว้างของพัลส์อยู่ในช่วง1.0-2.0มิลลิวินาทีเท่านั้น (เป็นLOWตลอดก็ไม่ได้เป็นHIGHตลอดก็ไม่ได้) ส่วนPWM ความกว้างของพัลส์สามารถเปลี่ยนแปลงได้ตั้งแต่ไม่มีสัญญาณเลย(เป็นLOWตลอด)ไปจนถึงมีสัญญาณต่อเนื่อง(เป็นHIGHตลอด)
เซอร์โวมอเตอร์ที่มีขายกันนั้นจะบอกสเป็คให้เราทราบอยู่สองอย่างคือแรงบิด(ออนซ์-นิ้วหรือกรัม-เซนติเมตร)และความเร็ว ตัวอย่างเช่น เซอร์โวตัวหนึ่งมีสเป็คบอกไว้ว่า
40ounce-inches/.21 นั้นหมายความว่าที่ความยาว1นิ้วจากจุดศูนย์กลางของแกนเซอร์โวจะมีแรง40ออนซ์ ส่วนตัวเลข .21ที่ต่อท้ายนั้นหมายถึง แกนเซอร์โวสามารถหมุนไป60องศาได้ใน0.21วินาที
เซอร์โวมอเตอร์ที่มีขายจะมีช่วงของแรงบิดตั้งแต่17ออนซ์-นิ้วไปจนถึง200ออนซ์-นิ้ว ถ้ามีขนาด(กว้าง-ยาว) แรงบิด ความเร็ว แตกต่างไปจากขนาดมาตรฐานราคาจะแพงขึ้นอย่างมากจนน่าใจหาย ซึ่งเซอร์โวขนาดมาตรฐานนั้นจะมีราคาอยู่ในช่วง500-700บาท ซึ่งถ้าเราเลือกขนาดที่เล็กกว่าหรือใหญ่กว่าขนาดมาตรฐานราคาจะแพงขึ้นเป็นหลักพันบาท ดังนั้นการเลือกใช้ขนาดของเซอร์โวให้เหมาะกับขนาดของโหลดจะช่วยประหยัดค่าใช้จ่ายลงได้ และจะได้เซอร์โวที่มีแรงบิด ขนาด และความเร็วที่เหมาะสมกับขนาดของหุ่นยนต์ที่จะสร้าง
ลองนึกถึงเซอร์โวที่มีขนาดเล็กที่สุดปกติแล้วมันก็น่าจะมีกำลังน้อยที่สุดและเซอร์โวขนาดใหญ่ก็จะมีกำลังมากและแข็งแรงที่สุด ในความเป็นจริงแล้วเซอร์โวมอเตอร์มีหลากหลายขนาดและความแข็งแรง ดังนั้นเซอร์โวขนาดเล็กบางตัวก็มีกำลังมากกว่าเซอร์โวขนาดใหญ่บางตัว ทำให้การพิจารณาด้วยขนาดอาจไม่ถูกต้องเสมอไปสำหรับการเลือกใช้เซอร์โว การจ่ายไฟให้กับเซอร์โวปกติจ่ายให้4.8โวลต์ก็ทำงานได้แล้วและในบางครั้งสามารถจ่ายได้ถึง6โวลต์หรืออาจถึง7.2โวลต์ก็สามารถทำงานได้เช่นเดียวกันซึ่งสิ่งที่จะได้กลับมาก็คือกำลังที่มากกว่าเดิมและจะหมุนได้รวดเร็วขึ้นแต่อย่างไรก็ตามในระยะยาวแล้วอาจทำให้เซอร์โวร้อนขึ้นกว่าเดิม
การเลือกใช้เซอร์โวบางคนอาจเลือกที่ลักษณะของแบริ่งที่ใช้ร่วมด้วยโดยแบริ่งที่ใช้รองรับการหมุนของแกนเซอร์โวจะช่วยให้มีอายุการใช้งานยาวนานขึ้นนั้นหมายความว่าจะมีความทนทานมากขึ้นด้วย แต่อย่างไรก็ตามเซอร์โวที่เป็นชนิดบอลแบริ่งนั้นจะมีราคาแพงมากกว่าแบริ่งแบบพลาสติกหรือแบบบูสน้ำมัน ในการเลือกซื้ออาจต้องพิจารณาว่านำใช้งานหนักหรือไม่ ถ้าใช่ก็ควรที่จะเลือกชนิดที่เป็นบอลแบริ่งถ้าเป็นงานเบาๆแบริ่งแบบบูสพลาสติดก็เพียงพอแล้ว
เราสามารถใช้เซอร์โวเป็นตัวต้นกำลังสำหรับหุ่นยนต์ได้สองแบบคือ เซอร์โวแบบที่ไม่ได้ดัดแปลง(เมื่อซื้อมาจากร้านส่วนใหญ่แล้วจะเป็นชนิดนี้)คือหมุนได้ไม่ครบรอบ สามารถควบคุมตำแหน่งได้ สามารถนำมาใช้กับหุ่นยนต์เดินแบบต่างๆได้ กับเซอร์โวแบบที่ดัดแปลงให้สามารถหมุนได้รอบ เหมาะกับหุ่นยนต์ที่อาศัยการเคลื่อนที่ด้วยล้อ เซอร์โวมอเตอร์ได้รับความนิยมอย่างมากในการนำมาทำเป็นหุ่นยนต์เดินขนาดเล็กในแบบต่างๆเนื่องจากมันมีขนาดเล็ก มีแรงบิดสูง การอินเตอร์เฟสทำได้ง่ายด้วยสายเพียงเส้นเดียว เราสามารถยึดชิ้นส่วนที่ต้องการเข้ากับหน้าแปนของแกนเซอร์โวได้ง่ายและมั่นคง ซึ่งหน้าแปนนี้มีให้เลือกได้หลายแบบตามแต่จะเลือกใช้ เช่นแบบกลม แบบเครื่องหมายบวก แบบดาว8แฉก เป็นต้น
ชิ้นส่วนพื้นฐานของเซอร์โวนั้นอย่างที่กล่าวมาแล้วจะประกอบไปด้วย ดีซีมอเตอร์ขนาดเล็ก ชุดเฟืองทด และวงจรอิเลคทรอนิกส์สำหรับควบคุมตำแหน่ง ถ้าเราต้องการดัดแปลงเซอร์โวให้หมุนได้รอบเราต้องตัดเอาเดือยพลาสติกที่ติดอยู่กับเฟืองตัวใหญ่สุดที่อยู่ภายในเซอร์โวออก ซึ่งเฟืองตัวใหญ่นี้ทำหน้าที่เป็นแกนเอาท์พุตของเซอร์โวด้วย และสิ่งที่ต้องเอาออกด้วยอีกอย่างก็คือตัวตรวจจับตำแหน่งของแกนเซอร์โวซึ่งก็คือตัวต้านทานปรับค่าได้นั้นเอง เมื่อนำสองสิ่งที่ว่านี้ออกแล้วเราก็จะได้มอเตอร์ดีซีพร้อมเฟืองทดที่มีแรงบิดสูงขนาดกระทัดรัดไว้ใช้งานแล้ว ซึ่งในตอนนี้เราจะสมมุติว่าเรามีเซอร์โวที่ได้ดัดแปลงมาแล้วและมีขนาดเหมาะสมกับหุ่นยนต์ที่เราจะสร้าง
การหากำลังเชิงกล สามารถ หาได้จากสูตร
เซอร์โวมอเตอร์นั้นสามารถสร้างกำลังได้พอสมควรภายใต้ขนาดที่เล็กกระทัดรัด ถ้าเราใช้เซอร์โวมอเตอร์เป็นตัวต้นกำลังสำหรับยกขาในหุ่นยนต์ที่เคลื่อนที่ได้ด้วยขานั้น เราจำเป็นต้องรู้ว่าเซอร์โวจำเป็นจะต้องยกน้ำหนักเท่าไรหรือโหลดมีขนาดเท่าใด ซึ่งจะแตกต่างจากหุ่นยนต์ที่เคลื่อนที่ด้วยล้อ เราไม่จำเป็นต้องมีสูตรคำนวณที่ซับซ้อนเพราะเราจะใช้ข้อมูลที่ได้จากเซอร์โวของบริษัทผู้ผลิต โดยข้อมูลที่จำเป็นดังกล่าวจะระบุไว้ข้างกล่องใส่เซอร์โวตอนที่เราซื้อมา ถ้ายังจำได้เราเคยพูดถึงแรงที่เกิดขึ้นสำหรับยกหรือดึงโหลดที่ห่างจากจุดศูนย์กลางเป็นระยะทาง1นิ้วหรือ1เซนติเมตร ซึ่งแรงที่เกิดขึ้นนี้เราสามารถรู้ได้จากข้อมูลที่ระบุไว้ข้างกล่อง จากข้อมูลดังกล่าวเราจะทราบว่าแรงสำหรับยกหรือดึงจะน้อยลงเรื่อยๆถ้าคานหรือก้านที่ใช้สำหรับดึงหรือยกยาวห่างจากจุดศูนย์กลางของแกนเซอร์โวมากขึ้น
ตัวอย่างเช่น เรามีเซอร์โวที่มีแรงบิด3.3kg-cm หมายความว่า ที่ระยะ 2 เซนติเมตรจากแกนของเซอร์โว ตัวเซอร์โวจะยังคงมีแรงบิด3.3kg-cmเช่นเดิม แต่น้ำหนักหรือโหลดที่มันยกได้จะเหลือเพียง1.65กิโลกรัม ซึ่งถ้าเราต้องการยกน้ำหนักหรือโหลดที่ระยะ2เซนติเมตรให้ได้3.3กิโลกรัม เราจำเป็นต้องเปลี่ยนมาใช้เซอร์โวขนาด6.6Kg-cmซึ่งตัวเซอร์โวจะมีขนาดใหญ่ขึ้นและราคาจะแพงขึ้น
ถ้าเราจำเป็นต้องใช้แรงบิดสำหรับยกโหลดที่มากขึ้นโดยโหลดนั้นมีขนาดมากกว่าแรงบิดของเซอร์โวที่เรามีอยู่ ทางหนึ่งที่จะช่วยได้คือการนำเอาหลักการของคานเข้าช่วย หัวใจสำคัญของหลักการนี้คือระยะห่างของจุดที่ออกแรงกับจุดหมุนของคานถ้าระยะห่างนี้มากแรงที่ใช้ก็จะน้อยลงและสามารถยกของหรือน้ำหนักได้มากขึ้น