เริ่มต้นใช้งาน Mixly
Mixly เป็นฟรีโอเพ่นซอร์สซอฟต์แวร์กราฟิกภาษา Visual Arduino ซึ่งจะทำให้การเขียนโปรแกรมทำได้ง่ายเหมือนกับการสร้างบล็อค Mixly GUI ได้รับการพัฒนาบนพื้นฐานของ Blockly และ Java8 ซึ่งสามารถทำงานได้บน OS Win7 หรือสูงกว่า มีไฟล์การติดตั้ง Arduino IDE รวมถึงโค้ดตัวอย่าง
1. ดาวน์โหลด โปรแกรม mixly ได้ที่ http://wiki.sunfounder.cc/index.php?title=Get_started_with_Mixly
อินเทอร์เฟซหลักของ Mixly
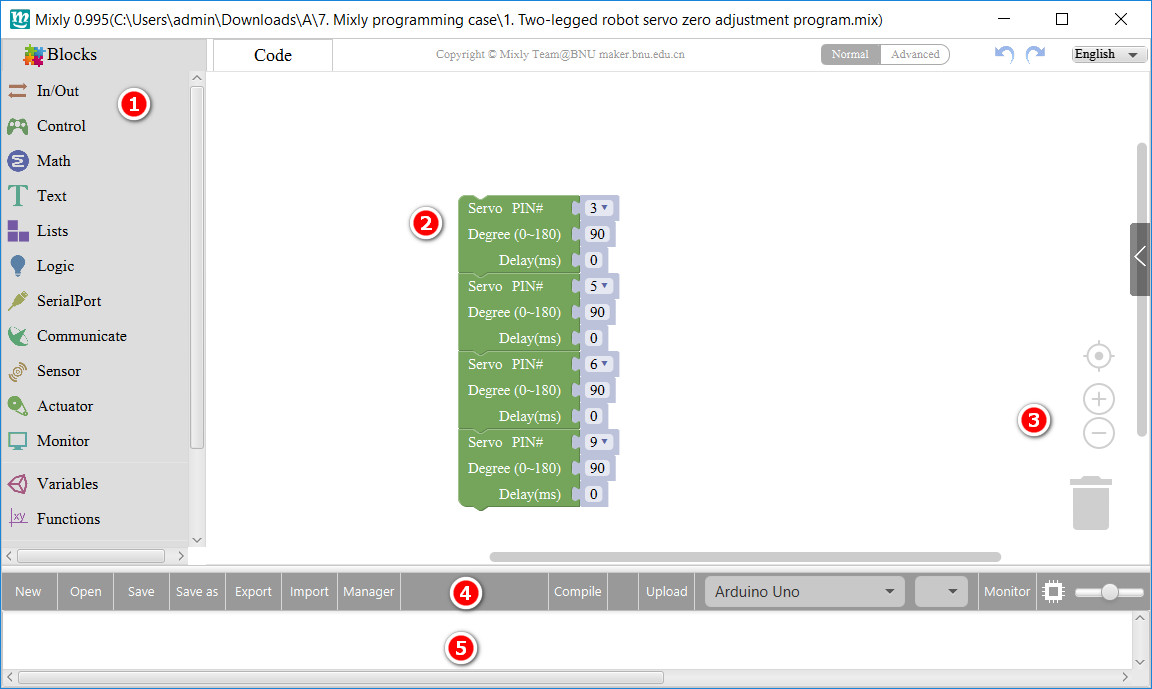
1 ด้านซ้าย พื้นที่ Blocks หมวดหมู่ บล็อก สำหรับเขียนโปรแกรม
2 ตรงกลาง พื้นที่เขียนโปรแกรม วาง Blocks
3 ด้านขวา เพื่อซูมเข้าหรือซูมออกและลบ
4 แถบสีเทาที่ด้านล่างสุดเป็นแถบเครื่องมือรวมถึงเมนูฟังก์ชันทั้งหมด
5 ด้านล่างสุดคือแถบแสดงข้อความ
Blocks
Mixly วางการเขียนโปรแกรมให้อยู่ในรูป Block ซึ่งได้แก่ In / Out, Control, SerialPort และ Block หมวดหมู่บล็อกอื่น ๆ ที่จำเป็นต้องใช้คำนวณทางคณิตศาสตร์ เช่น Math, Block ที่จำเป็นต้องใช้สำหรับ Biped Robot หุ่นยนต์เดิน 2ขา นั้นมีดังนี้
- In/Out: DigitalRead, DigitalWrite, AnalogRead, AnalogWrite, attachInterrupt, detachInterrupt, ShiftOut, etc.
- Control: Delay, if…do…, repeat…do…, System running time, setup, etc.
- Math: Map, Constrain, operations like +/-, sin/cos, random integer from…to… etc.
- Logic: if conditional statement, logical operations
- SerialPort: set baud rate, print data, read data
- Communicate: IR receive, IR send, I2C read/write device, to SPI, etc.
- Sensor: ultrasonic, DHT11, DS18B20
- Actuator: Tone control, servo and stepper control.
- Monitor: setup LCD pin, LCD print data, set LCD I2C address
- Variables: High/Low, True/False, float, integer, Boolean, string variables, etc.
- Functions: define function, do procedure with, etc.
ไดร์เวอร์
เมื่อเราเชื่อมต่อบอร์ด Arduino Nano เข้ากับคอมพิวเตอร์ คอมพิวเตอร์อาจแสดง “Unknown Device” หรือ “USB Serial Port” ด้วยเครื่องหมายอัศเจรีย์สีเหลือง ให้เราทำการตติดตั้งไดรเวอร์ให้เรียบร้อย โดยการ คลิกขวาที่ “Unknown Device” หรือ “USB Serial Port” พร้อมเครื่องหมายอัศเจรีย์สีเหลืองและคลิก “Update Driver Software” จากนั้นคลิก “Browse my computer for driver software”
ตัวอย่าง การเขียนโปรแกรม Mixly ควบคุมหุ่นยนต์
- ให้เชื่อมต่อบอร์ด Arduino Nano กับคอมพิวเตอร์ ด้วยสาย USB ที่เตรียมไว้ให้
- จากนั้นเปิด โปรแกรม Mixly เลือกประเภทของบอร์ดเป็น (Arduino Nano) และเลือกพอร์ต Com Port ให้ตรง
- จากนั้นไปที่ Open เพื่ออัพโหลดไฟล์โปรแกรม เราจะเห็นผลลัพธ์ของแต่ละโปรแกรม ว่า Biped Robot ทำงานตามโปรแกรมอย่างไร
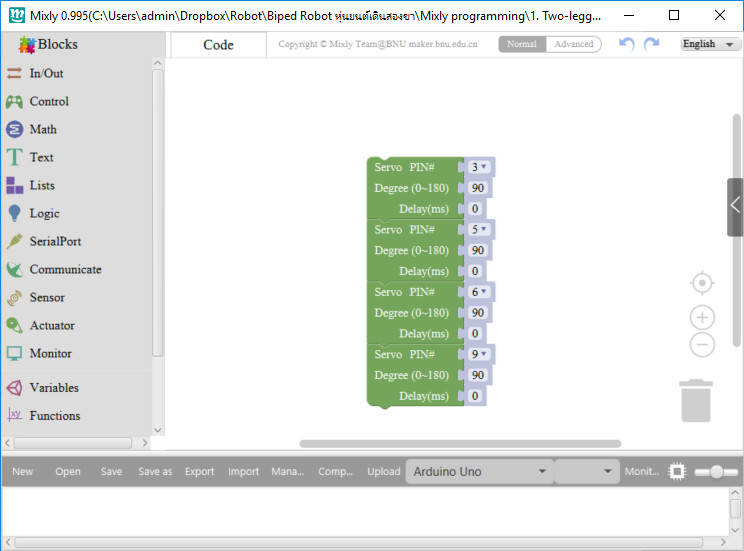
1. ตัวอย่าง โปรแกรมการปรับเซอร์โวทั้ง 4 ตัว ของหุ่นยนต์แบบเดินสองขา
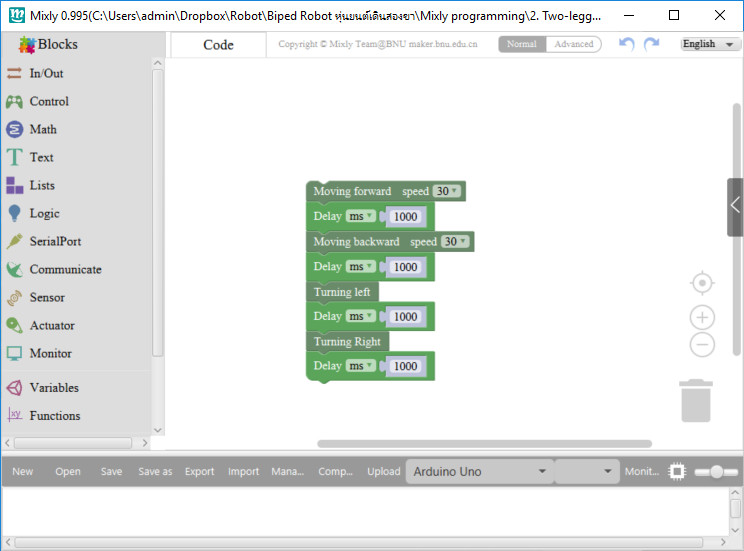
2. ตัวอย่าง โปรแกรมหุ่นยนต์เดินสองขา เดินหน้าถอยหลัง เลี้ยวซ้ายเลี้ยวขวา
3. ตัวอย่าง โปรแกรมหุ่นยนต์แบบสองขาเต้น
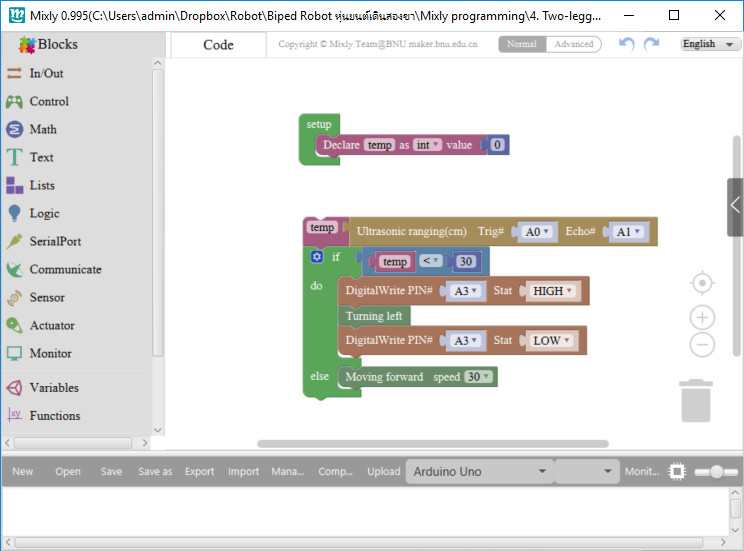
4. ตัวอย่าง โปรแกรมหุ่นยนต์เดินสองขา หลบหลีกสิ่งกีกขวาง โดยใช้อัลตราโซนิคเซนเซอร์
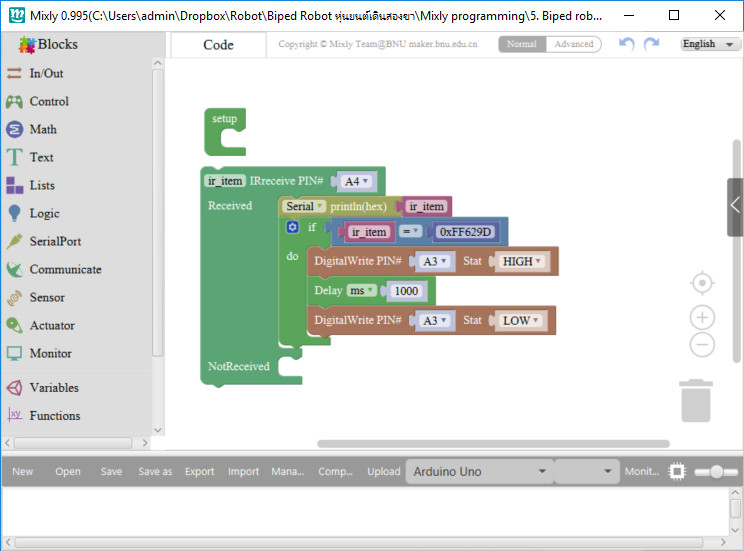
5. ตัวอย่าง โปรแกรมควบคุมหุ่นยนต์ไร้สายด้วยรีโมทอินฟราเรด
ดาวน์โหลด