Mirobot robotic arm firmware upgrade :
Method 1
1. Turn on the robot arm and plug the USB cable into the robot arm.
2. Open WLKATA Studio, enter Settings , select Mirobot and click Update Firmware .
Mirobot robotic arm firmware upgrade :
Method 2
1. Turn on the robot arm and plug the USB cable into the robot arm.
2. Find the “updatehex” folder in the root directory of “WlkataStudio”. As shown in Figure 17-5.
3. After opening “updatehex”, find “XLoader” and open it. As shown in Figure 17-6.
4. Open ” XLoader ” and select the latest robot arm firmware downloaded . As shown in Figure 17-7.
5. After selecting the arm firmware , click the ” Upload ” option. As shown in Figure 17-8.
Multifunction controller firmware upgrade :
Method 1
1. Turn on the robotic arm and plug the USB cable into the multi-function controller .
2. Find the “controlbox” folder in the root directory of “WlkataStudio”. As shown in Figure 17-10.
3. Open the folder “controlbox”, find and open the folder “bin file”. As shown in Figure 17-11
4. Double-click to open the folder “binfile”, as shown in Figure 17-12(1). Then put the firmware you just downloaded into it, delete the old version of the firmware, and only keep the latest firmware. As shown in Figure 17-12(2).
5. Open WLKATA Studio, enter the settings , click update firmware behind the multi-function controller firmware .
Method 2
1.. Turn on the robotic arm and plug the USB cable into the multi-function controller .
2. Install “flash_download_tool_3.8.8” and open the software.
3. After opening the software, a window will pop up, as shown in Figure 17-15.
Select ” ESP32 ” in the “Chip Type” column , as shown in Figure 17-16(1)
Select ” factory ” in the “Work Mode” column , as shown in Figure 17-16(2).
Click ” ok ” to go to the next step
4. The page is now locked and needs to be manually unlocked. Uncheck ” LOCK SETTINGS “. As shown in Figure 17-17.
The red box is the multi-function controller firmware (c-), and the blue box is the Bluetooth teach pendant firmware (t-). Here we don’t consider the teach pendant, only choose the controller. The address below is 0x00 by default .
Select the downloaded latest multi-function controller firmware to load
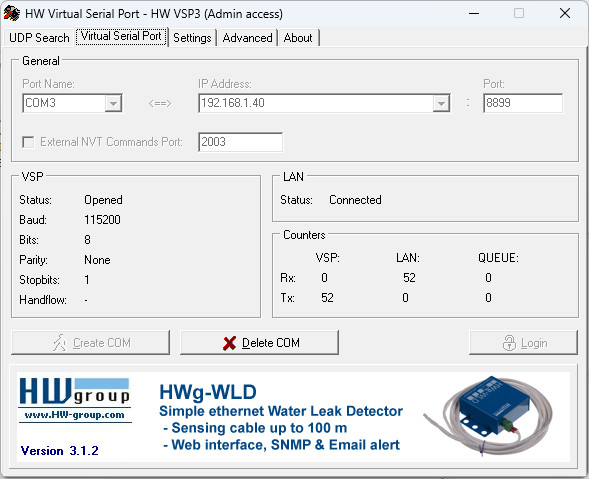
Select the robot port , and select 921600 as the baud rate . Figure 17-19
Then click the ” Start ” button. Figure 17-20