ข้อดีของมอเตอร์ Brushless DC (BLDC) เมื่อเทียบกับมอเตอร์ DC แบบแปรงถ่าน

มอเตอร์กระแสตรงไร้แปรงถ่าน (BLDC) เป็นมอเตอร์ที่ให้ ประสิทธิภาพสูง ควบคุมได้แม่นยำ และเหมาะกับงานสมัยใหม่ มากกว่ามอเตอร์ DC แบบแปรงถ่าน โดยมีข้อดีหลักดังนี้
-
ประสิทธิภาพสูงกว่า
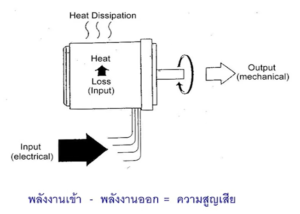
ไม่มีการสูญเสียพลังงานจากการเสียดสีของแปรงถ่าน ทำให้แปลงพลังงานไฟฟ้าเป็นพลังงานกลได้ดีกว่า -
ให้แรงบิดสูงอย่างสม่ำเสมอในช่วงการทำงาน
มอเตอร์ BLDC สามารถรักษาแรงบิดสูงได้ต่อเนื่องตลอดช่วงความเร็ว
ในขณะที่มอเตอร์ DC แบบแปรงถ่านให้แรงบิดสูงสุดเฉพาะบางจุดของการหมุนเท่านั้น
ผลลัพธ์คือ มอเตอร์ BLDC ขนาดเล็กสามารถให้กำลังได้สูงกว่าที่คาด -
ควบคุมแรงบิดและความเร็วได้อย่างแม่นยำ
สามารถใช้งานร่วมกับระบบป้อนกลับ (Feedback) เช่น Hall Sensor หรือ Encoder
เพื่อควบคุมแรงบิดและความเร็วให้ตรงตามที่ต้องการได้อย่างแม่นยำ -
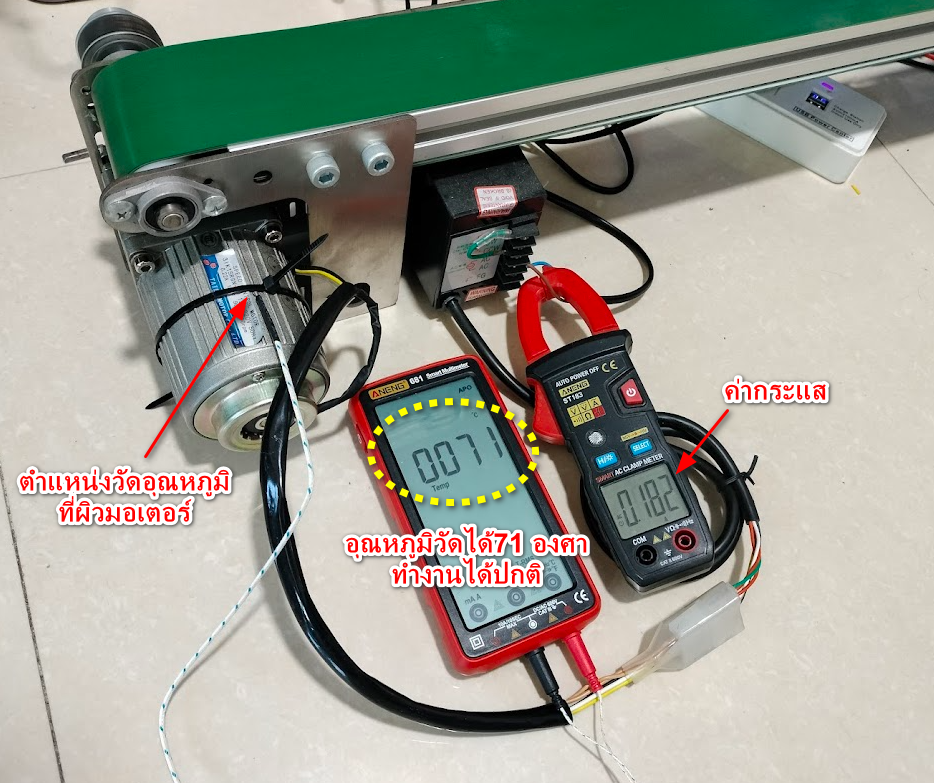
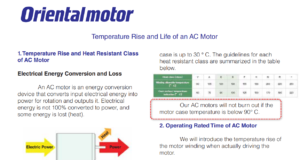
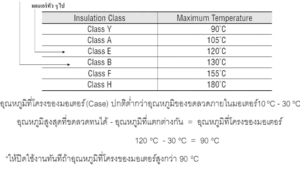
ใช้พลังงานอย่างมีประสิทธิภาพ และเกิดความร้อนต่ำ
การควบคุมที่แม่นยำช่วยลดการสูญเสียพลังงาน ลดความร้อนสะสม และเพิ่มอายุการใช้งานของมอเตอร์ -
เหมาะกับระบบใช้แบตเตอรี่
เนื่องจากกินไฟน้อยกว่าและมีประสิทธิภาพสูง
ทำให้ อายุการใช้งานแบตเตอรี่ยาวนานขึ้นอย่างชัดเจน -
สัญญาณรบกวนทางไฟฟ้าต่ำ และไม่มีประกายไฟ
ไม่มีแปรงถ่าน จึงไม่เกิดประกายไฟจากการสัมผัส
ลด EMI และเหมาะกับงานอิเล็กทรอนิกส์หรืออุปกรณ์ความแม่นยำสูง -
บำรุงรักษาน้อย อายุการใช้งานยาว
ไม่มีชิ้นส่วนที่สึกหรอง่ายอย่างแปรงถ่าน
เหมาะกับงานที่ต้องทำงานต่อเนื่องหรือเข้าถึงซ่อมยาก -
ใช้งานแพร่หลายในหลายอุตสาหกรรม
เช่น ออโตเมชัน หุ่นยนต์ ยานยนต์ไฟฟ้า เครื่องมือแพทย์ พัดลมอุตสาหกรรม และระบบขับเคลื่อนต่าง ๆ
ทำไมมอเตอร์ BLDC ถึงหมุนได้โดยไม่มีแปรงถ่าน?
เนื่องจาก โรเตอร์เป็นแม่เหล็กถาวร
จึงไม่จำเป็นต้องใช้แปรงถ่านในการส่งกระแสไฟฟ้าเหมือนมอเตอร์ DC แบบดั้งเดิม
การจ่ายกระแสไฟฟ้าไปยังขดลวดสเตเตอร์จะถูก ควบคุมจากภายนอกโดยไดรเวอร์อิเล็กทรอนิกส์
ซึ่งทำหน้าที่สลับเฟสกระแสอย่างแม่นยำ ทำให้เกิดสนามแม่เหล็กหมุนและขับให้โรเตอร์หมุนตาม
แนวคิดนี้ช่วยให้:
- ควบคุมการหมุนได้ละเอียดกว่า
- ลดการสูญเสียทางกล
- เพิ่มประสิทธิภาพและความทนทานของระบบโดยรวม
สรุป:
มอเตอร์ BLDC จึงเป็นตัวเลือกที่เหมาะสำหรับงานที่ต้องการ ความแม่นยำ, ประสิทธิภาพสูง, และการทำงานต่อเนื่อง เช่น ยานยนต์ไฟฟ้า, หุ่นยนต์, เครื่องใช้ไฟฟ้า และโดรน ซึ่งเหนือกว่ามอเตอร์ DC แบบแปรงที่เหมาะกับงานง่าย ๆ และต้นทุนต่ำกว่า
อ้างอิงข้อมูลเชิงเทคนิคจาก Renesas
(Engineer School – Brushless DC Motor Overview)
https://www.renesas.com/us/en/support/engineer-school/brushless-dc-motor-01-overview