
คำอธิบาย
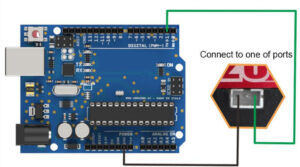
เซอร์โวมอเตอร์ Hiwonder LX-224HV เป็นเซอร์โวบัสอนุกรม (Serial Bus Servo) ที่มาพร้อมขั้วต่อ 3 ช่อง (3 Connectors) ช่วยให้สามารถเชื่อมต่อเซอร์โวหลายตัวเข้าด้วยกันแบบอนุกรม (Daisy Chain) ได้อย่างสะดวกและเป็นระเบียบ ลดความยุ่งยากของการเดินสายไฟในการสร้างระบบหุ่นยนต์
ด้วยแรงบิดสูงและโครงสร้างภายในที่แข็งแรง จึงเหมาะสำหรับการใช้งานร่วมกับ ข้อต่อหุ่นยนต์ไบโอนิค เช่น แขนกล, ขาหุ่นยนต์, หุ่นยนต์ฮิวแมนนอยด์ และแพลตฟอร์มการเรียนรู้ด้าน AI Robotics
การเชื่อมต่อแบบ Serial Bus (3 ขั้ว) ช่วยให้สามารถเชื่อมต่อเซอร์โวหลายตัวแบบต่อเนื่อง (Daisy Chain) ได้ง่าย

คุณสมบัติเด่น (Features):
- แรงดันสูง 11.1V ลดกระแสลงมากกว่า 60% เมื่อเทียบกับเซอร์โว 7.4V แบบเดิม ทำให้ ประหยัดพลังงานและยืดอายุการใช้งาน
- มีเซ็นเซอร์วัดมุมในตัว (Potentiometer ความแม่นยำสูง) รองรับการ Feedback ตำแหน่ง
- รองรับ Feedback ข้อมูลตำแหน่ง / อุณหภูมิ / แรงดันไฟฟ้า ป้องกันการไหม้ของเซอร์โว
- ใช้ เฟืองโลหะทั้งชุด เพิ่มความทนทานและอายุการใช้งาน
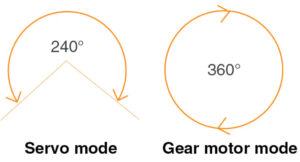
โหมดทำงาน 2 แบบ:
-
- Servo Mode: หมุนได้ในช่วง 0°–240°
- Gear Motor Mode: หมุนได้สูงสุด 360°
คุณสมบัติ
- แรงบิดสูงสุด 24 kg·cm @ 8.4V
- แรงดันไฟฟ้าใช้งาน 6.5V – 8.4V (รองรับแรงดันสูง)
- ความเร็ว 0.17 sec/60° @ 8.4V
- มุมหมุน 0° – 240° (หรือโหมดหมุนต่อเนื่อง)
- ประเภทมอเตอร์ Coreless Motor
- เฟือง โลหะทั้งชุด (Full Metal Gear)
- การควบคุม Serial Bus (TTL UART, Half-Duplex)
- Feedback ตำแหน่ง, แรงดัน, อุณหภูมิ, แรงโหลด
- ขั้วต่อ 3 ช่อง (สะดวกในการต่อพ่วงแบบ Daisy Chain)
- น้ำหนัก ประมาณ 55 กรัม
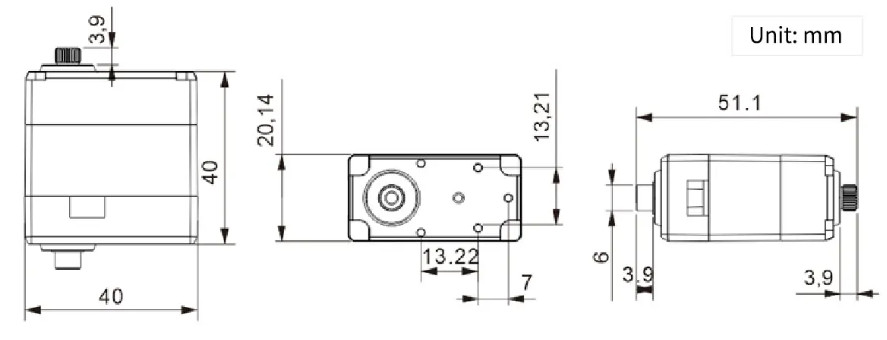
- ขนาด 40.5 x 20 x 40.3 มม.
Dimension
Servo Debugging System (ระบบตั้งค่าและดีบักเซอร์โว)
ผู้ใช้งานสามารถตั้งค่าและตรวจสอบการทำงานของเซอร์โวแบบละเอียดได้ ดังนี้
| ฟังก์ชัน | รายละเอียด |
|---|---|
| Set ID Number | กำหนดหรือเปลี่ยนหมายเลข ID ของเซอร์โว |
| Working Mode | เลือกโหมดการทำงาน: Servo Mode / Gear Motor Mode |
| Rotation Speed | ปรับความเร็วในการหมุนของเซอร์โว |
| Position Deviation | ตั้งค่าความเบี่ยงเบนหรือ Offset ของตำแหน่งหมุน |
| LED Light | เปิด/ปิด หรือกระพริบไฟ LED บนเซอร์โวเพื่อตรวจสอบ |
| Temperature Alarm | ตั้งค่าอุณหภูมิที่ระบบจะเตือนหรือหยุดทำงานเพื่อป้องกันความร้อนเกิน |
| Voltage Alarm | ตั้งค่าแรงดันไฟต่ำสุด/สูงสุดที่อนุญาต เพื่อป้องกันความเสียหายจากไฟผิดพิกัด |
ในชุดบรรจุ (Packing List)
| จำนวน | รายการ | คำอธิบาย |
|---|---|---|
| 1 ชิ้น | LX-224HV High Voltage Bus Servo | เซอร์โวบัสแรงดันสูง 11.1V รุ่น LX-224HV |
| 1 ชิ้น | Main Servo Horn | แขนเซอร์โวหลัก (สำหรับติดที่เพลาหมุน) |
| 1 ชิ้น | Assistant Servo Horn | แขนเซอร์โวเสริม |
| 1 เส้น | Servo Wire | สายไฟเชื่อมต่อเซอร์โว (แบบ Serial Bus) |
| 15 ตัว | Self-tapping Screw | สกรูเกลียวปล่อย (สำหรับยึดชิ้นส่วนต่างๆ) |
| 2 ตัว | Main Assistant Screw | สกรูสำหรับยึดแขนเซอร์โวหลัก/เสริม |
ตัวอย่างโค้ด Arduino
เปลี่ยน ID จาก 1 → 2
#define GET_LOW_BYTE(A) (uint8_t)((A))
#define GET_HIGH_BYTE(A) (uint8_t)((A) >> 8)
#define LOBOT_SERVO_FRAME_HEADER 0x55
#define LOBOT_SERVO_ID_WRITE 13
byte LobotCheckSum(byte buf[]) {
byte i;
uint16_t temp = 0;
for (i = 2; i < buf[3] + 2; i++) {
temp += buf[i];
}
temp = ~temp;
return (byte)temp;
}
void LobotSerialServoSetID(HardwareSerial &SerialX, uint8_t oldID, uint8_t newID) {
byte buf[7];
buf[0] = buf[1] = LOBOT_SERVO_FRAME_HEADER;
buf[2] = oldID;
buf[3] = 4;
buf[4] = LOBOT_SERVO_ID_WRITE;
buf[5] = newID;
buf[6] = LobotCheckSum(buf);
SerialX.write(buf, 7);
}
void setup() {
Serial.begin(115200); // Baudrate
pinMode(13, OUTPUT);
delay(1000);
}
void loop() {
delay(500);
digitalWrite(13, HIGH);
LobotSerialServoSetID(Serial, 1, 2); // เปลี่ยน ID จาก 1 เป็น 2
delay(500);
digitalWrite(13, LOW);
}
Project 2: ควบคุมเซอร์โวให้หมุน (ID1 และ ID2)
เซอร์โว 2 ตัว สลับตำแหน่งไปมาแบบต่อเนื่อง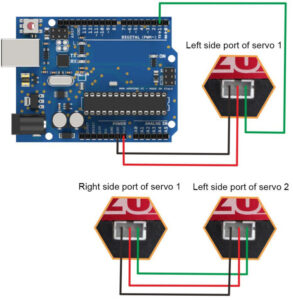
#define GET_LOW_BYTE(A) (uint8_t)((A))
#define GET_HIGH_BYTE(A) (uint8_t)((A) >> 8)
#define LOBOT_SERVO_FRAME_HEADER 0x55
#define LOBOT_SERVO_MOVE_TIME_WRITE 1
byte LobotCheckSum(byte buf[]) {
byte i;
uint16_t temp = 0;
for (i = 2; i < buf[3] + 2; i++) {
temp += buf[i];
}
temp = ~temp;
return (byte)temp;
}
void LobotSerialServoMove(HardwareSerial &SerialX, uint8_t id, int16_t position, uint16_t time) {
byte buf[10];
if (position < 0) position = 0;
if (position > 1000) position = 1000;
buf[0] = buf[1] = LOBOT_SERVO_FRAME_HEADER;
buf[2] = id;
buf[3] = 7;
buf[4] = LOBOT_SERVO_MOVE_TIME_WRITE;
buf[5] = GET_LOW_BYTE(position);
buf[6] = GET_HIGH_BYTE(position);
buf[7] = GET_LOW_BYTE(time);
buf[8] = GET_HIGH_BYTE(time);
buf[9] = LobotCheckSum(buf);
SerialX.write(buf, 10);
}
#define ID1 1
#define ID2 2
void setup() {
Serial.begin(115200);
delay(1000);
}
void loop() {
LobotSerialServoMove(Serial, ID1, 100, 500);
LobotSerialServoMove(Serial, ID2, 500, 500);
delay(1000);
LobotSerialServoMove(Serial, ID1, 500, 500);
LobotSerialServoMove(Serial, ID2, 600, 500);
delay(1000);
LobotSerialServoMove(Serial, ID1, 900, 500);
LobotSerialServoMove(Serial, ID2, 700, 500);
delay(1000);
LobotSerialServoMove(Serial, ID1, 500, 500);
LobotSerialServoMove(Serial, ID2, 600, 500);
delay(1000);
}



รีวิว
ยังไม่มีบทวิจารณ์