คำอธิบาย
ดิจิตอลเซอร์โวมอเตอร์แรงบิดสูง Super Hi Torque Digital Servo Motor Robot การประยุกต์ใช้ หุ่นยนต์, แขนกล, งานที่ต้องการควบคุมแรงบิดสูง
คุณสมบัติเด่น
- ดิจิทัลเซอร์โวแท้ (Digital Servo) ตอบสนองไว ระยะทำงานกว้าง ไม่มี dead zone ไม่ใช่เซอร์โวอนาล็อก
- รองรับระบบรีโมต Futaba, JR, SANWA, Hitec และระบบมาตรฐานทั่วไป
- เทคโนโลยีควบคุมกำลังแบบเสถียร ไม่ใช้ฟิวส์ตัดเหมือนเซอร์โวทั่วไป→ รุ่นนี้ จำกัดแรงบิดให้อยู่ในโซนปลอดภัยและทำงานต่อได้
- ทำงานต่อเนื่อง ไม่หลุดสัญญาณ
- เหมาะกับงานออกแบบเครื่องจักรหลากหลายประเภท
สเปคทางเทคนิค 180kg
- Robot Servo ASMC-04B / ASMC-05B
- แรงบิดสูงสุด
- 24V at 180kg.cm (1764N.cm)
- 12V at 90kg.cm (882N.cm)
- แรงดัน DC12 – 24V (B- เชื่อมต่อกับขั้วลบ, B+ เชื่อมต่อกับขั้วบวก)
- Potentiometer Encoder
- No load Current < 0.40A
- สัญญาณอินพุต DC0 – 5V
- ความแม่นยำ Control Accuracy +/- 0.32°
- ความเร็วเชิงมุม 24V (0.50s / 60°), 12V(1s / 60°)
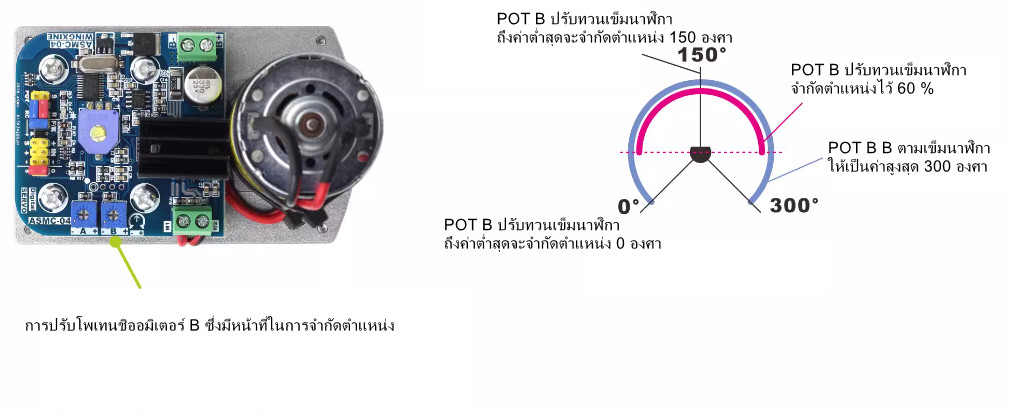
- มุมการหมุน 300° สูงสุด (0-300°MAX, ปรับได้)
- วัสดุเกียร์ เหล็ก
- ขนาดเพลาไดมิเตอร์ Dimeter shaft size 8 mm
- ขนาด 95.5 x 60.5 x 102.6 mm
โหมดอินพุทสัญญาณ Pulse / สัญญาณอนาล็อก (Potentiometer)
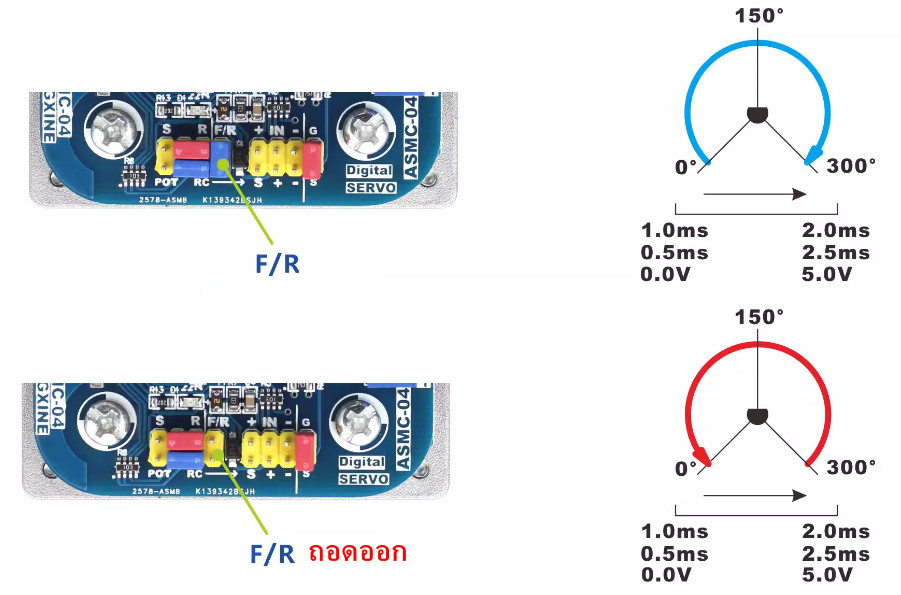
- ช่วงอินพุทสัญญาณ Pulse 0.5ms – 2.5ms
- ช่วงอินพุทสัญญาณ Pulse 1ms – 2ms ตัวควบคุมหลายช่องสัญญาณ สำหรับรีโมตคอนโทรลแบบไร้สาย, โปรแกรม SCM, Arduino ฯลฯ
ในชุดประกอบด้วย
- 1pcs x มอเตอร์ ดิจิตอลเซอร์โวมอเตอร์แรงบิดสูง Super Hi Torque Digital Servo Motor Robot
- 1pcs x สายสัญญาณ P2.54mm-3 Core ยาว 20cm
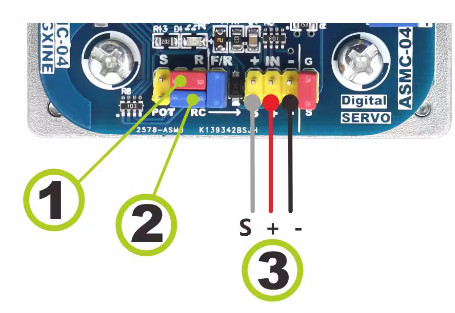
การเลือกโหมดการควบคุม PPM / POT
1. การควบคุมดิจิตอลเซอร์โวโดยใช้ตัวต้านทานปรับค่าได้ Potentiometer การเลือกโพเทนชิออมิเตอร์: 10k, 50k, 100k, โพเทนชิโอมิเตอร์เชิงเส้นที่มีความต้านทานมากกว่า 10k

2.การควบคุมดิจิตอลเซอร์โว RC MODE
- บอร์ดอาดูโน่ Arduino
- MCU Micro Controller ตระกูลอื่นๆที่มีการสร้างสัญญาณ PWM หรือมีช่องต่อ RC Servo
- หรือกล่องควบคุม เซอร์โว จาก รีโมทบังคับวิทยุระยะไกล 2.4GHz RC Transmitter Receiver
สามารถสั่งการผ่านรีซีฟ (Receiver) ได้ไหม?
✅ คำตอบ: ได้ครับ! เนื่องจากเซอร์โวตัวนี้รองรับสัญญาณ PWM แบบมาตรฐานเดียวกับรีซีฟของระบบวิทยุบังคับ (เช่น FlySky, Futaba, Radiolink ฯลฯ) สามารถ:
- เสียบเซอร์โวเข้ากับช่องสัญญาณของรีซีฟโดยตรง
- ใช้รีโมทควบคุมเพื่อสั่งตำแหน่งมุมหมุนของเซอร์โว
2.1 RC MODE 1ms โดยใช้สัญญาณพัลส์ PPM
2.2 RC MODE 2ms โดยใช้สัญญาณพัลส์ PPM

การเปลี่ยนทิศทางการหมุนของ โดยการตั้งค่าจัมเปอร์ F/R
ด้วยสัญญาณอินพุตเดียวกัน การตั้งค่าจัมเปอร์เพื่อเปลี่ยนทิศทางการหมุน โหมดนี้เหมาะสำหรับโหมด “RC” และโหมด “POT”
การตั้งค่าช่วงการทำงานของการหมุนเซอร์โว POT B
Dimension

อุปกรณ์ที่สามารถใช้ร่วมกันได้
- CSRF08 คัปปลิ้ง ข้อต่อเพลา ข้อต่อหน้าแปลน Rigid Flange Coupling Shaft 8mm
ตัวอย่าง Code การควบคุมดิจิตอลเซอร์โวโดยใช้ PWM
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 150; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 150; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
ตารางเปรียบเทียบสเปคทางเทคนิค Robot Servo 110kg vs 180kg
| รายการ | สเปคทางเทคนิค 110kg | สเปคทางเทคนิค 180kg |
|---|---|---|
| รุ่น | ASMC-04A / ASMC-05A | ASMC-04B / ASMC-05B |
| แรงดันไฟเลี้ยง | DC 12–24V (B- ขั้วลบ, B+ ขั้วบวก) | DC 12–24V (B- ขั้วลบ, B+ ขั้วบวก) |
| แรงบิดสูงสุด @24V | 110 kg·cm (1078 N·cm) | 180 kg·cm (1764 N·cm) |
| แรงบิดสูงสุด @12V | 55 kg·cm (539 N·cm) | 90 kg·cm (882 N·cm) |
| Encoder | Potentiometer | Potentiometer |
| กระแสขณะไม่มีโหลด | < 0.35 A | < 0.4 A |
| สัญญาณอินพุต | DC 0–5V | DC 0–5V |
| ความแม่นยำการควบคุม | 0.32° | ±0.32° |
| ความเร็วเชิงมุม @24V | 0.12 s / 60° | 0.5 s / 60° |
| ความเร็วเชิงมุม @12V | 0.24 s / 60° | 1.0 s / 60° |
| มุมการหมุน | 0–300° (ปรับได้) | 0–300° (ปรับได้) |
| วัสดุเกียร์ | เหล็ก | เหล็ก |




รีวิว
ยังไม่มีบทวิจารณ์