
คำอธิบาย
ชุดรางเลื่อนสไลด์บอลสกรู ประกอบสำเร็จพร้อมใช้งานมีตัวควบคุมเสียบไฟใช้ได้เลย
ลูกค้าสามารถแก้ไขโปรแกรมเพื่อปรับเปลี่ยนการเคลื่อนที่และความเร็วในแบบของตัวเองให้เหมาะสมกับงาน
รางเลื่อนพร้อมบอลสกรู มี Linear Guide ออกแบบมาเพื่อให้การเคลื่อนที่เชิงเส้นมีความแม่นยำสูง ค่าสัมประสิทธิ์แรงเสียดทานต่ำ ทำจากวัสดุโลหะผสมอลูมิเนียมคุณภาพสูง ทนต่อการสึกหรอ การใช้งานทนทาน. เหมาะสำหรับอุตสาหกรรมระบบอัตโนมัติ
Stroke
- Effective Stroke 300mm
- Body Length ความยาวไม่รวมมอเตอร์ (300+110) = 410mm
ข้อมูลจำเพาะ Linear Guide Slide Ball Screw
- Stainless Lead Screw
- Lead Diameter 16mm
- Screw Pitch 5mm
- Screw Type Trapezoidal
- Width 56mm
- Accuracy 0.3mm
- Max Speed 50mm/s
- Force Movement Linear Guide
- Aluminium Profile T-Nut M4 ด้านใน Slot สำหรับติดตั้งฐานร่วมกับ Aluminium Profile ขนาดอื่นๆ
- Support Stepper motor BLDC motor, Servo motor, Nema17 (42mm), Nema23 (57mm)
- Load capacity
- Horizontal 20Kg
- Vertical 10Kg การรองรับน้ำหนักได้จริงจะขึ้นอยู่กับ สเปคของมอเตอร์ที่ใช้ร่วมกับระบบ เช่น แรงบิด, อัตราทด, ระบบเบรก, การระบายความร้อน และไดรฟ์ที่ใช้ควบคุมมอเตอร์ หากมอเตอร์มีแรงบิดไม่เพียงพอ อาจส่งผลต่อประสิทธิภาพการเคลื่อนที่หรือความปลอดภัยของระบบ

ในชุดประกอบด้วย
- 1pcs x LSS001 ชุดรางเลื่อนสไลด์ บอลสกรู Stroke Linear Slide rail Set Ball Screw SX1605N
- 1pcs x MT2304-1 สเต็ปเปอร์มอเตอร์ Stepper Motor Nema23 57mm 57BYG250B-8 1.2Nm Shaft Dai 8mm
- 1pcs x DMST06 กล่อง Driver TB6600
- 1pcs x BDMC13 Arduino Uno R3 Compatible
- 1pcs x CDU101 สายยูเอสบี USB 2.0 Cable 0.3Meter Type A To Type B Blue
- 1pcs x PA1205 Power Adaptor DC12V/5A
- 1pcs x CB0003 สายไฟ Cable DC Jack 5.5×2.1mm-30cm-Female
- 1pcs x CB0004 สายไฟ Cable DC Jack 5.5×2.1mm-30cm-Male
ตัวอย่างการสั่งงานด้วย Arduino Code สำหรับทดสอบการทำงานบอลสกรู
Dimension Linear Guide Slide Ball Screw

- Block 60x42mm (สูง 34mm)
- Block ระยะห่างระหว่างรู (Pitch): 30×30 mm (แนวนอน × แนวตั้ง)
https://docs.google.com/document/d/10ss3BFjEWcU4eSeZQ6lWRBdMbcTXL9cooPVfT3l-a_E/edit?usp=sharing
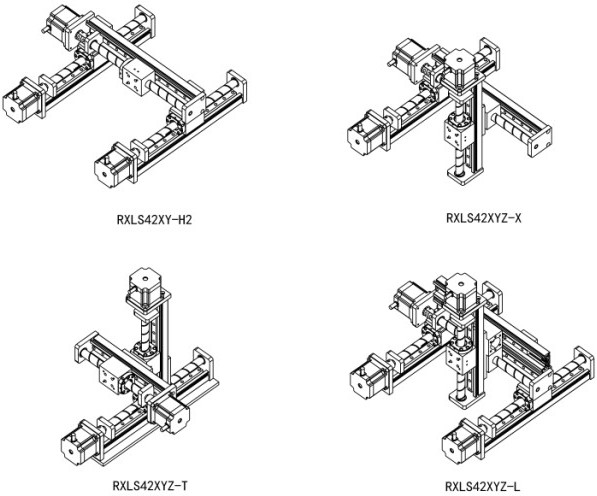
การประยุกต์ใช้งาน
- BKPA01 แผ่นเพลทอลูมิเนียม เชื่อมต่อข้ามแกนรางบอลสกรู Aluminum X-Y Cross Connection Plate 30×30 X1605-I
- BKPA02 แผ่นเพลทอลูมิเนียม เชื่อมต่อข้ามแกนรางบอลสกรู Aluminum X-Y Cross Connection Plate 30×30 X1605-L Vertical
- Screw M4 ยึด Block ระยะห่างระหว่างรู (Pitch): 30×30 mm (แนวนอน × แนวตั้ง)
- Screw M4 ยึด ร่องอลูมิเนียมโปรไฟล์ ด้านล่าง ระยะห่างระหว่างรู (Pitch): 30×30 mm (แนวนอน × แนวตั้ง)
Wiring Diagram




รีวิว
ยังไม่มีบทวิจารณ์