คำอธิบาย
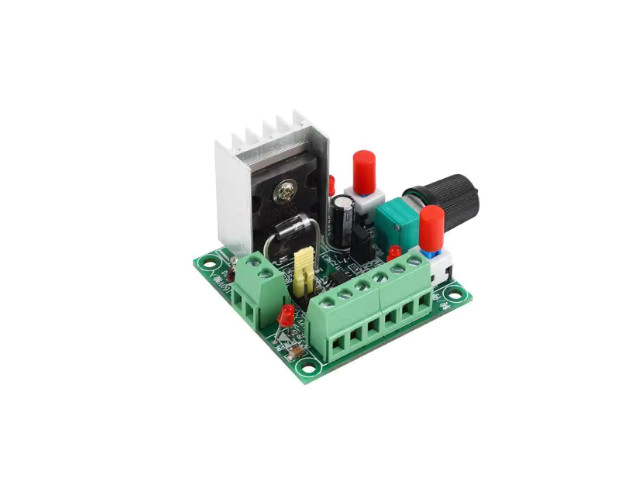
เป็นโมดูลสร้างพัลส์ซึ่งให้สัญญาณไดรเวอร์สเต็ปเปอร์ บอร์ดสร้างความถี่ ควบคุมความเร็วสเต็ปเปอร์มอเตอร์ Stepper Motor Nema17 42, Nema23 57mm สร้างสัญญาณพัลส์และสัญญาณ PWM ตัวควบคุมมีสัญญาณความถี่ทั้งหมด 3 ชนิด สามารถเลือกได้ด้วยจัมเปอร์
-
- Voltage Input DC12-160V
- PWM Mode Signal Generator Speed Control Switching Frequency *การวัดความถี่ สามารถวัดได้ทั้งพอร์ต PUL เทียบ GND
- 1-2 – High ความถี่สูง 5.8 kHz – 127kHz
- 3-4 – Medium ความถี่กลาง 590 Hz – 15.8 kHz
- 5-6 – Low ความถี่ต่ำ 82 Hz – 2.3 kHz
- ควบคุมการหมุนไปข้างหน้าและ กลับ ได้โดยการกดปุ่ม ข้างซ้าย
- ควบคุมการเริ่มและหยุดของมอเตอร์ได้โดยการกดปุ่ม ข้างขวา
- สามารถควบคุมความเร็วของมอเตอร์ได้โดยการเปลี่ยนความถี่ ด้วยการปรับโพเทนชิออมิเตอร์
เทคนิคการควบคุม stepping Motor จะประกอบไปด้วย
- บอร์ดสร้างความถี่ PWM + ไดรเวอร์สเต็ปเปอร์ + สเต็ปเปอร์มอเตอร์ + แหล่งจ่ายไฟ DC
Pinout
- PUL+ และ PUL- เป็นบวกและลบของพัลส์
- EN+ และ EN- เป็นผลบวกและลบของเทอร์มินัลที่เปิดใช้งาน
- DIR+ และ DIR- เป็นค่าบวกและค่าลบของทิศทาง
Common Anode Connection Method (B)

EN – Connect EN
PUL – Connect CLK
DIR – Connect DIR
EN+PUL+DIR+ Connect to COM+
Common cathode connection method (B)

EN + Connect EN
PUL + Connect to CLK
DIR + Connect DIR
EN-PUL-DIR Connect to COM-

รีวิว
ยังไม่มีบทวิจารณ์