


คำอธิบาย
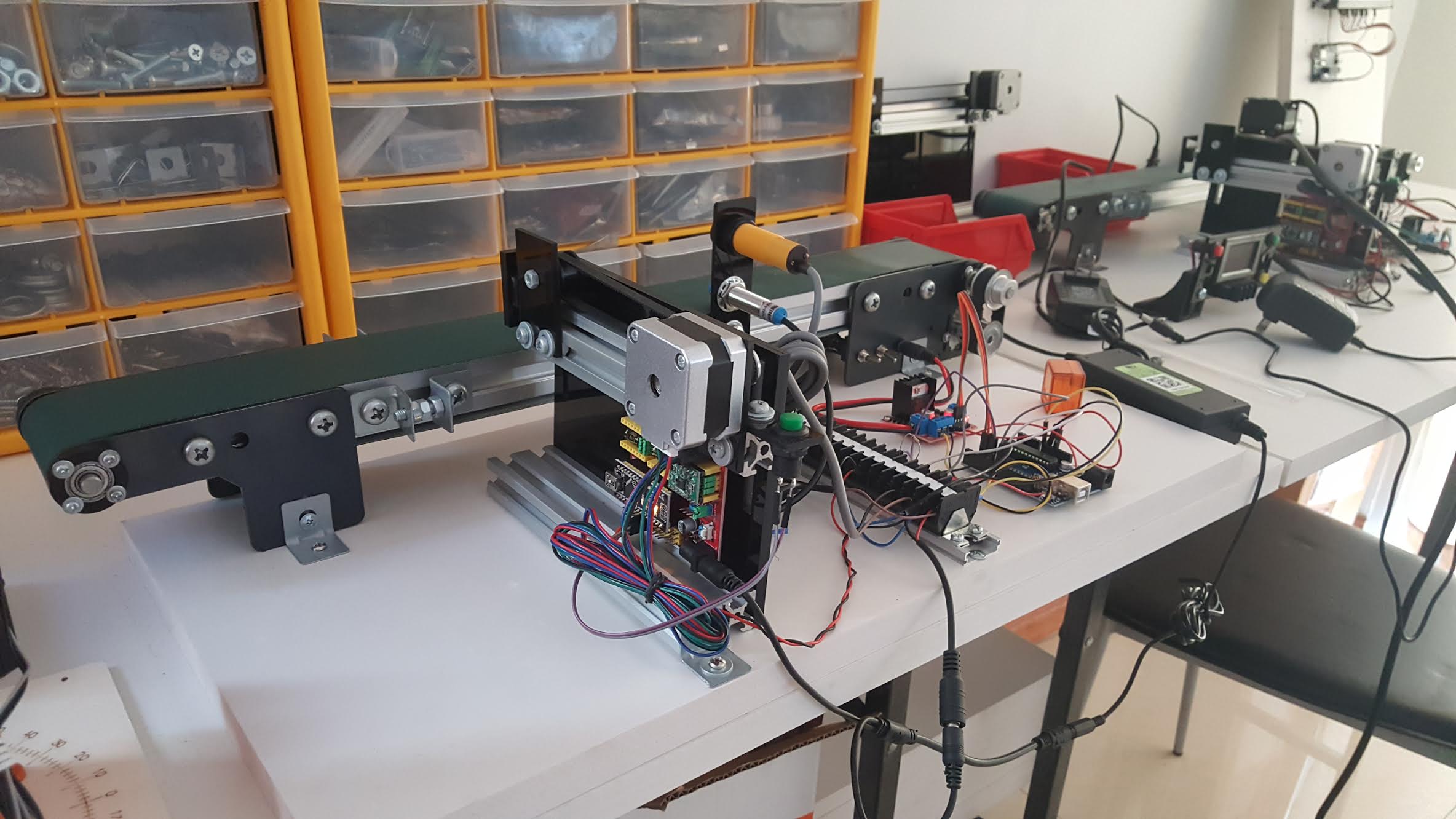
ชุดทดลองตรวจจับวัตถุบนสายพานลำเลียง
Automation Conveyor + Photoelectric sensors + Counter
ระบบอัตโนมัติ หรือ Automation ประกอบด้วย Hardware และ Software ที่ทำงานร่วมกัน ให้สามารถควบคุมการทำงาน ของระบบเป็นไปแบบอัตโนมัติ ระบบอัตโนมัติ นั้นจะเกี่ยวข้องกับ ระบบควบคุม Control System รวมถึงวิศวกรรมแมคคาทรอนิกส์และหุ่นยนต์พื้นฐานของระบบอัตโนมัติประกอบด้วยส่วนหลักๆคือ
- อินพุทจากเซนเซอร์ต่างๆ เซ็นเซอร์วัดความดัน Pressure sensor, เซ็นเซอร์อุลตราโซนิค Ultrasonic sensor , เซ็นเซอร์ความชื้น Humidity sensor, เซ็นเซอร์วัดก๊าซ Gas sensor, เซ็นเซอร์ตรวจจับการเคลื่อนไหวแบบพีไออาร์ PIR motion sensor, เซ็นเซอร์วัดความเร่ง Acceleration sensor, เซ็นเซอร์วัดแรง Force sensor, เซ็นเซอร์สี color sensor, เซ็นเซอร์เซ็นเซอร์วัดมุมและการหมุน gyro sensor, เซ็นเซอร์อัลตราโซนิก ultrasonic sensor และอื่นๆเช่น เทอร์โมไพล์
- การสื่อสาร – สายเคเบิล USB, RS485, WiFi และอื่นๆ
- ตัวควบคุม เช่น MCU และอื่นๆ
- เอาท์พุท – เช่นวาล์ว, มอเตอร์, หลอดไฟ, ลำโพง และอื่นๆ
มีอะไรเตรียมไว้ให้ในชุด
- สายพานลำเลียง Mini Conveyor + แหล่งจ่ายไฟอะแดปเตอร์ / AC-DC Adaptor 1 ตัว
- ชุดผลักชิ้นงาน Rejector แบบใช้ Step motor 1 ชุด
- บอร์ด L298P Motor Shield 1 บอร์ด
- บอร์ด Arduino Uno 1 บอร์ด
- ชุดสายไฟแบบหัวเสียบ DC Jack สำหรับต่อมอเตอร์ 1 ชุด
- ชิ้นงานสำหรับทดสอบสี ทดสอบโลหะ ทดสอบอโลหะ ทดสอบน้ำหนัก ทดสอบของเหลว ทรงกระบอก 1 เซต
- เซนเซอร์ Photoelectric ติดตั้งบนแผ่นเพลท 1 ตัว
- ชุด Counter แสดงผลนับ 7-Segment 4 หลัก
การใช้ Photoelectric Proximity sensors ตรวจจับชิ้นงาน

- สายสีน้ำตาล : +5V
- สายสีน้ำเงิน : GND
- สายสีดำ : DIGITAL OUTPUT / NPN normally open (Active Low) ต่อ DIGITAL OUTPUT เข้ากับขา Analog ของ Arduino Uno
Photoelectric sensors เป็นเซนเซอร์ใช้ตรวจจับวัตถุที่อยู่ห่างออกไประยะทางตรวจจับแตกต่างกันไปตาม P/N: ของเซนเซอร์ตัวนั้นๆ Photoelectric sensors โดยมากก็จะสามารถตรวจจับวัตถุได้ในระยะ 3cm – 80cm โดยประมาณ ทั้งนี้ โฟโตอิเล็กทริคเซ็นเซอร์ ทำงานโดยใช้หลัก การใช้แสงสะท้อนเพื่อตรวจจับวัตถุ ซึ่งโฟโตอิเล็กทริคเซ็นเซอร์สามารถนำมาตรวจจับวัตถุได้เกือบทุกชนิด.
โค้ด Arduino
int Speed = 255; // กำหนด Speed 0-255 ความเร็วสายพาน
เมื่อ Photoelectric เจอชิ้นงานแล้ว
รอเวลาให้ชิ้นงานวิ่งไปใกล้ Rejector สามารถเปลี่ยนแปลงค่าให้เหมาะสมกับความเร็วสายพาน
ส่ง Logic 0 เพื่อให้ Rejector ทำงาน เปรียบเสมือน การ กดสวิตช์
ส่งสัญญาณไปยังวงจรเคาท์เตอร์
หน่วงเวลาขาลง นาน 100 มิลลิเซค
คู่มือการใช้งานชุดทดลอง Automation Conveyor
- https://www.dropbox.com/sh/65s1bco53zf2zii/AACtUNL04D5q8IjNrlkuwFP5a?dl=0
- https://www.dropbox.com/sh/125h1rywzbicczl/AAA9kOqgjyV-gbKzEt3AkcCHa?dl=0




รีวิว
ยังไม่มีบทวิจารณ์