
คำอธิบาย
SLAMKit โซลูชัน IMU + SLAM สำหรับหุ่นยนต์เคลื่อนที่ AGV AMR
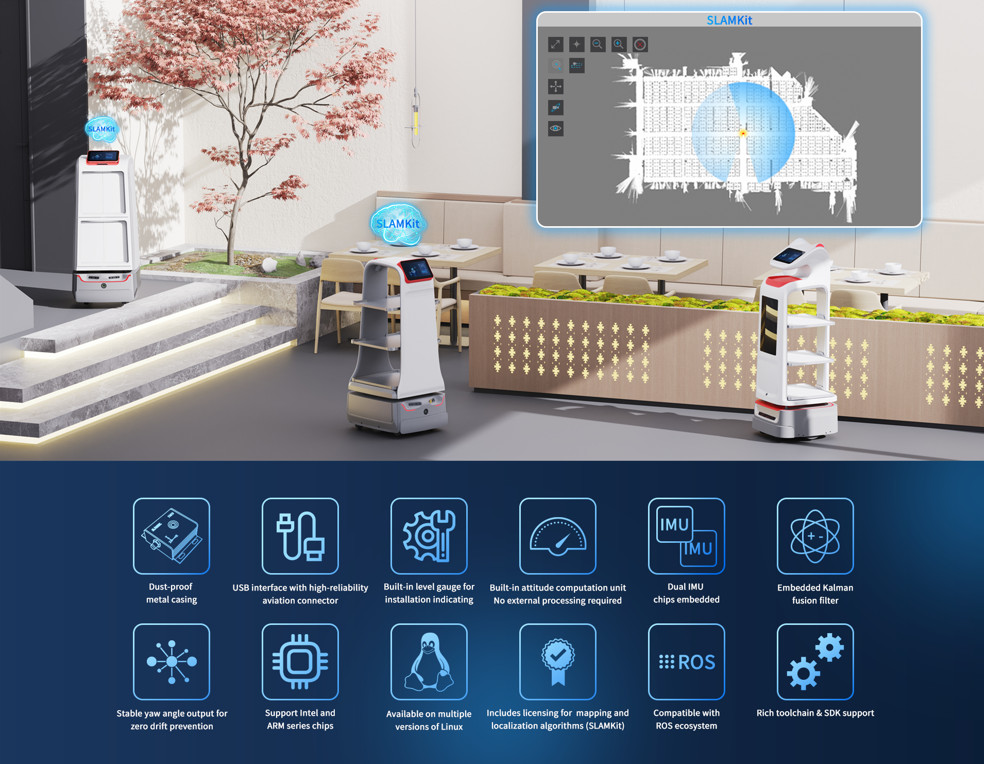
“SLAMKit คือโซลูชัน IMU + SLAM ระดับอุตสาหกรรมสำหรับหุ่นยนต์เคลื่อนที่ ติดตั้งง่าย รองรับ ROS ใช้งานได้ทั้งงานพัฒนาเชิงวิจัยและผลิตจริง ช่วยให้ระบบนำทางหุ่นยนต์แม่นยำขึ้น พร้อม Toolchain สำหรับ Mapping และ Localization แบบ Real-time”
จุดเด่น
- เซ็นเซอร์ IMU 9 แกน (Gyro, Accelerometer, Magnetometer)
- ใช้ Algorithm SLAM เชิงพาณิชย์จาก SLAMTEC ที่ผ่านการใช้งานจริงใน AGV/AMR
- ใช้งานร่วมกับ ROS ได้ทันที (ROS Compatible)
- รองรับ Windows, Linux และแพลตฟอร์มฮาร์ดแวร์ยอดนิยม
- ติดตั้งง่าย เชื่อมต่อผ่านสาย USB เพียงเส้นเดียว
- มีซอฟต์แวร์สำหรับ Mapping, Calibration และ Debug ครบถ้วน
ชุดสินค้ามาตรฐานประกอบด้วย
- SLAMKit IMU Module จำนวน 1 ชุด
- Industrial USB-to-M12 Cable จำนวน 1 เส้น
- โปรแกรม/ไลบรารีสำหรับใช้งานบน Windows, Linux, ROS
สเปค
| รายการ | ค่า |
|---|---|
| IMU | 9-axis (3 Gyro + 3 Acc + 3 Mag) |
| Accuracy | <0.5° (Orientation) |
| Output | USB 2.0 / UART |
| แรงดันไฟฟ้า | 5VDC |
| ขนาด | 78 × 64 × 27 mm |
| ระบบที่รองรับ | Windows / Linux / ROS |
| ฟังก์ชันหลัก | Real-time SLAM (Mapping + Localization), IMU Fusion |
ซอฟต์แวร์ที่มาพร้อม SLAMKit
SLAMKit ไม่ได้ให้เพียงแค่ฮาร์ดแวร์ IMU + SLAM Module เท่านั้น แต่ยังมาพร้อมระบบซอฟต์แวร์ครบวงจรเพื่อสนับสนุนการใช้งานจริง ตั้งแต่ขั้นตอนการพัฒนา การติดตั้ง ไปจนถึงการบำรุงรักษา ดังนี้
1. SLAMKit Toolchain
โปรแกรมหลักสำหรับ Mapping, Calibration, Monitoring
ใช้สำหรับ:
- สร้างแผนที่ (Map Building)
- แสดงตำแหน่งหุ่นยนต์แบบ Real-time (Localization)
- ตรวจสอบ Sensor Data (IMU, Pose, Path)
- Calibrate เซ็นเซอร์อย่างง่ายผ่าน GUI
2. SDK และไลบรารีสำหรับนักพัฒนา
รองรับหลายระบบและภาษายอดนิยม
- ROS Driver สำหรับ ROS1 / ROS2
- Windows SDK (C/C++ API)
- Linux SDK (C/C++ API)
- Python Sample Code สำหรับ Rapid Prototyping
3. Visualization & Debugging Tool
- แสดง Point Cloud, Pose และ Path
- Export / Import แผนที่ได้
- ใช้งานร่วมกับ RPLidar, Slamtec Mapper และเซ็นเซอร์อื่นได้
4. User Interface ใช้งานง่าย
- เชื่อมต่อผ่าน USB/UART แล้วเริ่มใช้งานได้ทันที
- ไม่จำเป็นต้องเขียน SLAM Algorithm เอง
- เหมาะทั้งภาค R&D และ Production
ระบบซอฟต์แวร์ของ SLAMKit ถูกออกแบบมาให้ “พร้อมใช้งานจริง” ลดเวลา Coding, ลดความยุ่งยากด้าน Math/SLAM Algorithm ให้คุณโฟกัสกับงาน “พัฒนาหุ่นยนต์”
ตัวอย่างการใช้งาน
- ระบบ AGV ขนส่งสินค้าในคลัง
- หุ่นยนต์เช็ดพื้นและทำความสะอาดอัตโนมัติ
- หุ่นยนต์นำทางภายในคลินิก โรงเรียน โรงงาน
- Mobile Robot เพื่อการสาธิตและการศึกษา
- งาน R&D ด้าน SLAM, Navigation, Autonomous Robotics
“SLAMKit คือหัวใจของระบบนำทางหุ่นยนต์อัจฉริยะ ให้หุ่นยนต์ของคุณรู้จักแผนที่ รู้ตำแหน่งตัวเอง และเคลื่อนที่อย่างแม่นยำ ติดตั้งง่าย รองรับ ROS และนำไปใช้ได้จริงในงานอุตสาหกรรม ช่วยย่นระยะเวลาในการพัฒนา ลดต้นทุนเซ็นเซอร์ และเพิ่มประสิทธิภาพการทำงานของหุ่นยนต์ได้อย่างชัดเจน”
ประโยชน์ในการใช้งาน
- เพิ่มความแม่นยำในการนำทางสูงขึ้นกว่า 50%
- ลดเวลา Calibrate และ Setup มากกว่า 40%
- ลดต้นทุนการติดตั้งระบบและเซ็นเซอร์ซ้อนทับ
- เพิ่มประสิทธิภาพการทำงานของหุ่นยนต์ได้มากกว่า 2 เท่า




รีวิว
ยังไม่มีบทวิจารณ์