
คำอธิบาย
กริปเปอร์ Gripper มือจับหุ่นยนต์ Robot Finger ประยุกต์ใช้กับแขนหุ่นยนต์จับขวด
มีอะไรเตรียมไว้ให้ในชุด
- 1pcs x กริปเปอร์ Gripper มือจับหุ่นยนต์ Robot Finger
- ราคา เฉพาะ Gripper ไม่รวม RC Servo motor
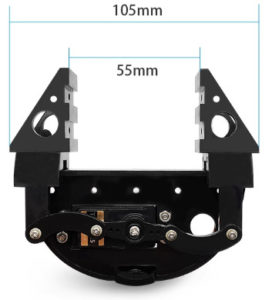
ข้อมูลกริปเปอร์ Gripper
- วัสดุพลาสติก ABS
- กริปเปอร์ Gripper Finger อ้ากว้าง 54mm
- Finger 2
- การควบคุม ใช้กับ Servo Motor ควบคุม ความกว้างของพัลส์ PWM


ตัวอย่าง Code ทดสอบ Gripper ABS ใช้ Arduino
/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Sweep
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 90; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
//myservo.write(90); // จับ
//myservo.write(180); // ปล่อย
for (pos = 90; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 90; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}



รีวิว
ยังไม่มีบทวิจารณ์