
GPCU03 กล่องควบคุมกริปเปอร์ PLC Servo Gripper Control Converter Set-2pcs
฿2,100.00
สั่งจองสินค้าได้
คำอธิบาย
กล่องควบคุมกริปเปอร์ จาก PLC Converter + Servo Gripper
- กล่องควบคุมกริปเปอร์ PLC Servo Gripper Converter
- ปกติการควบคุม Gripper ด้วย PLC จะทำแบบ ON/OFF ผ่านหน้าสัมผัส NO NC ของ PLC แต่ในกรณีที่ Gripper เป็นแบบเซอร์โว หน้าสัมผัส PLC ไม่สามารถควบคุมการทำงานของ Gripper ได้โดยตรง
- จำเป็นต้องมี Converter เพื่อควบคุม Gripper การทำงาน โดยใช้ คอนแทค ของ PLC ไปควบคุม Converter
- สามารถปรับระยะการจับให้กว้างหรือแคบได้ที่ Potentiometer ที่กล่อง Converter
ในชุดประกอบด้วย
- 1pcs x กล่องควบคุมกริปเปอร์ PLC TO Gripper Converter
- 1pcs x GPAF01 กริปเปอร์ไฟฟ้า มือจับหุ่นยนต์ Robot Finger Gripper Model C+RC Servo Motor
- 1pcs x MT0601 เซอร์โวมอเตอร์ แรงบิดสูง Digital High Torque RC Servo Motor 20kg 180D TD-8120MG
วิธีการใช้งาน PLC Servo Gripper Control Converter
- ไฟเลี้ยงแรงดัน DC12-24V เข้าที่สายไฟแดงดำด้านล่าง ของกล่อง
- ต่อ กริปเปอร์ Gripper เข้ากับพอร์ตด้านบนของกล่องได้แก่สายตัวเมีย 2.54 mm เป็นเต้ารับ โดยการต่อให้ตรงสี
- สีแดงคือไฟ DC 5 V จ่ายให้กับเซอร์โวมอเตอร์
- สีดำ คือกราวด์ GND
- สีส้มหรือน้ำตาลคือสัญญาณ Signal ควบคุมเซอร์โว
- |___| Gripper || การปรับระยะ Gripper หมุนลูกบิดไปทางซ้าย |___| หมายถึง Gripper จะอ้าออก หมุนลูกบิดไปทางขวา || หมายถึง Gripper จะบีบเข้า
- การควบคุมกริปเปอร์ การสั่งงานให้ gipper เริ่มสตาร์ทการทำงานทำได้ 2 วิธี
- 4.1 Test Switch โดยการกดปุ่มสวิทช์ด้านล่างซ้ายค้างไว้
- 4.2 การต่อสาย Control 2 เส้นด้านล่าง ช็อต ต่อถึงกัน ห้ามจ่ายไฟเข้าที่สายไฟ 2 เส้นนี้
- 4.3 หรือใช้ PLC สั่งการโดยการต่อผ่านหน้าสัมผัสของรีเลย์ภายใน PLC ดังวงจรด้านล่าง PLC ที่ใช้ควรเป็นรุ่น Output ที่เป็นรีเลย์ ตัวอย่าง PLC ใช้ Common กับ Y0, Y1, Y2 หรือ Y ใดๆตามที่ต้องการออกแบบ Ladder
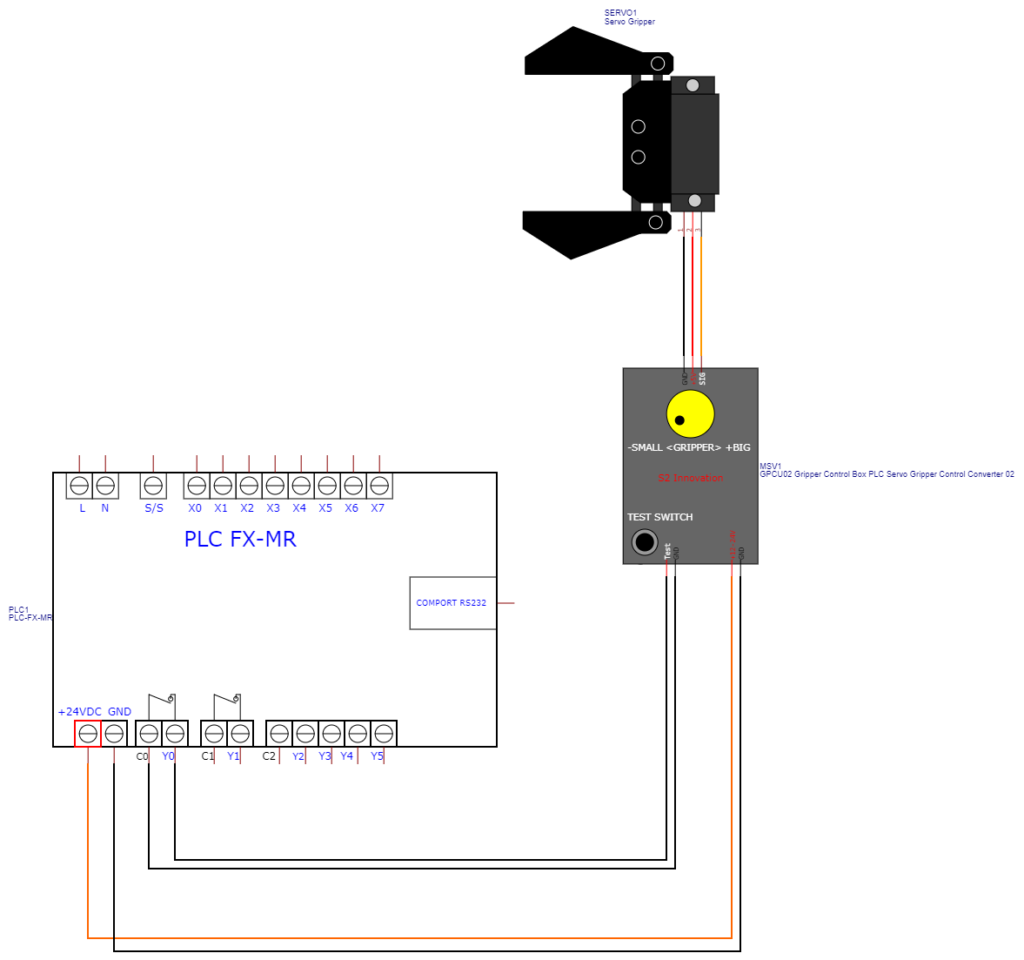
ควบคุมให้ Gripper ทำงานโดยการใช้ Relay จาก PLC




รีวิว
ยังไม่มีบทวิจารณ์