
คำอธิบาย
เซอร์โวมอเตอร์ขนาดเล็กคุณภาพสูง เหมาะสำหรับหุ่นยนต์แขนกล แขนข้อต่อ (เช่น Arduino TinkerKit Braccio) หรือระบบควบคุมที่ต้องการความแม่นยำ น้ำหนักเบา และแรงบิดเพียงพอ
อะไหล่หุ่นยนต์ เซอร์โวมอเตอร์สำหรับหุ่นยนต์ เกียร์โลหะทั้งหมด SR431 J-type plug 180 degree robot steering gear SR-431 Spring RC
steering gear model robot steering gear metal gear double bearing
Tinkerkit Braccio robot M1 M2 M3 M4
ข้อมูลทางเทคนิค (Specifications)
- Modulation Analog
- Rotation angle 180 degrees
- Weight 2.19 oz (62.0 g)
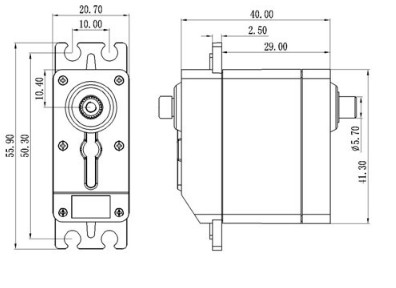
- Dimensions Length 42.0 mm Width 20.5 mm Height 39.5 mm
Torque
-
- 169.5 oz-in (12.2 kg-cm) @ 6.0V
- 201.4 oz-in (14.5 kg-cm) @ 7.4V
Speed
-
- 0.2sec/60° @4.8V
- 0.18 sec/60° @7.4V
Dimensions
การประยุกต์ใช้
หุ่นยนต์, แขนกล, งานที่ต้องการควบคุมแรงบิดสูง ตำแหน่งที่ใส่ได้
- M1: SR431 Base 0° – 180°
- M2: SR431 Shoulder 15° – 165°
- M3: SR431 Elbow 0° – 180°
- M4: SR431 Wrist vertical 0° – 180°
ตัวอย่าง Code การควบคุมดิจิตอลเซอร์โวโดยใช้ PWM
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 150; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 150; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
SpringRC SR431 เป็นเซอร์โวอนาล็อกขนาด 9 กรัม ที่ออกแบบมาเพื่อความ เสถียรและราคาประหยัด ไม่ได้เน้นความแรงหรือความเร็วสูง แต่ให้ประสิทธิภาพที่เพียงพอสำหรับงานควบคุมทั่วไป และใช้งานได้อย่างคาดเดาได้
ในงาน RC เซอร์โวรุ่นนี้เหมาะสำหรับ
- เครื่องบินไฟฟ้าขนาดเล็ก (Park Flyer)
- โมเดลไฟฟ้าทั่วไป
สำหรับงาน หุ่นยนต์ การเรียนการสอน และงานต้นแบบ (Prototype) เซอร์โวรุ่นนี้ถือว่าเหมาะมาก เนื่องจาก
- ใช้มาตรฐาน 9g (หาง่าย เปลี่ยนง่าย)
- ควบคุมแบบอนาล็อก ใช้งานไม่ซับซ้อน
- ราคาต่อชิ้นต่ำ เหมาะกับงานจำนวนมาก / ห้องเรียน / เวิร์กช็อป




รีวิว
ยังไม่มีบทวิจารณ์