คำอธิบาย
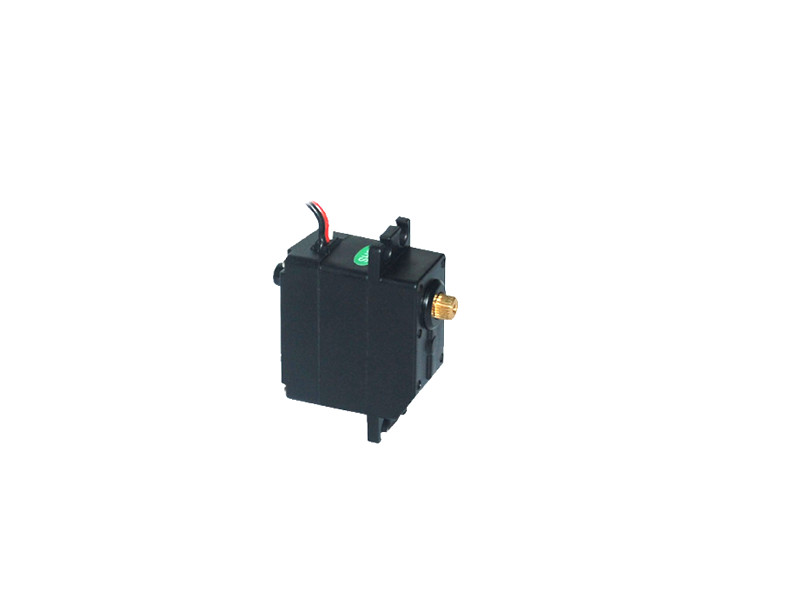
อะไหล่หุ่นยนต์ เซอร์โวมอเตอร์สำหรับหุ่นยนต์ เกียร์โลหะทั้งหมด SR311 J-type plug 180 degree robot steering gear SR-311 Spring RC
steering gear model robot steering gear metal gear double bearing
Tinkerkit Braccio robot M5 M6
- Modulation Analog
- Rotation angle 180 degrees
- Weight 32.9g
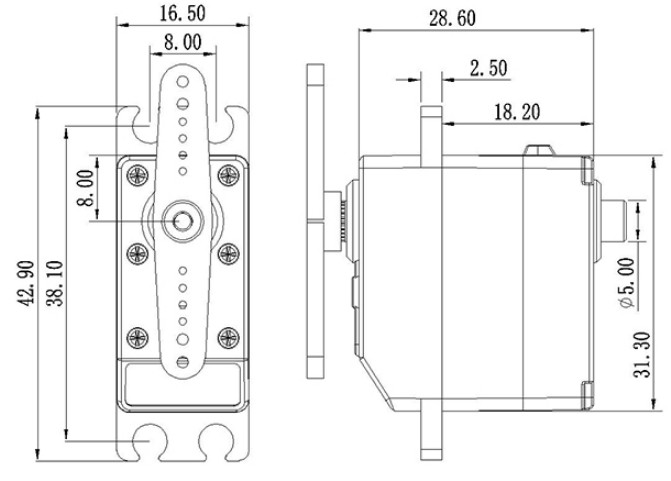
- Dimensions Length 31mm Width 16.5mm Height 28.6mm
Torque
-
- 3.1 kg-cm @ 4.8V
- 3.8 kg-cm @ 6.0V
Speed
-
- 0.14 sec/60° @4.8V
- 0.12 sec/60° @6V
Dimensions
การประยุกต์ใช้
หุ่นยนต์, แขนกล, งานที่ต้องการควบคุมแรงบิดสูง
ตัวอย่าง Code การควบคุมดิจิตอลเซอร์โวโดยใช้ PWM
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
#include <Servo.h> Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards int pos = 0; // variable to store the servo position void setup() { myservo.attach(9); // attaches the servo on pin 9 to the servo object } void loop() { for (pos = 0; pos <= 150; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 150; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } } |
เฉพาะลูกค้าที่เข้าสู่ระบบ และเคยซื้อสินค้าชิ้นนี้แล้วเท่านั้น ที่เขียนบทวิจารณ์ได้





รีวิว
ยังไม่มีบทวิจารณ์