คำอธิบาย
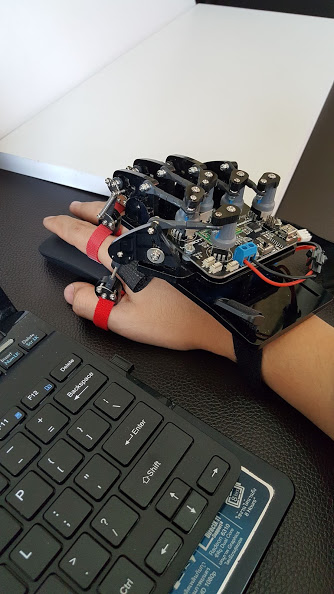
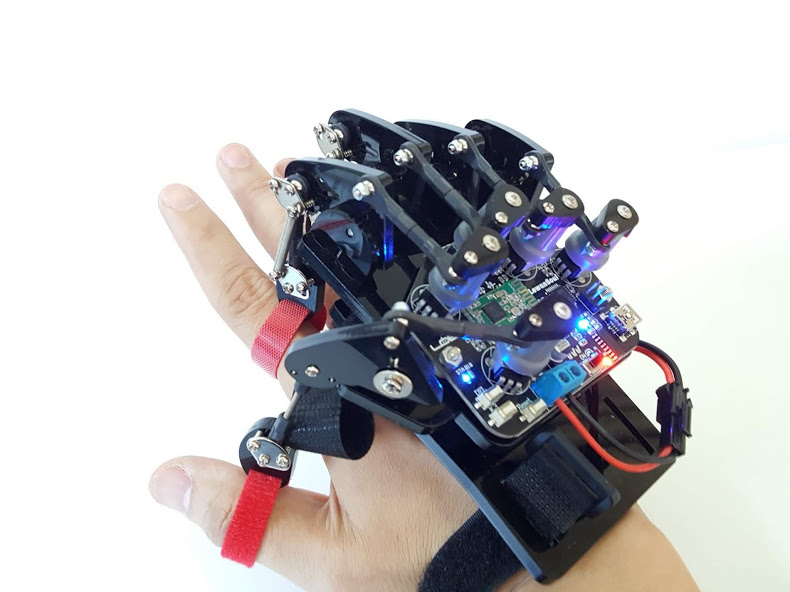
มือกลคอนโทรลเลอร์ไร้สายแบบเชิงกล exoskeleton arm ที่พัฒนาบน Arduino UNO Mechanical Design of a Robotic Arm Exoskeleton
ประกอบด้วย
- บอร์ด Arduino UNO ATmega328 32KB, 2KB SRAM, 1KB EEPROM
- Bluetooth 4.0 BLE บนแผงควบคุม เชื่อมต่อ โดยอัตโนมัติ
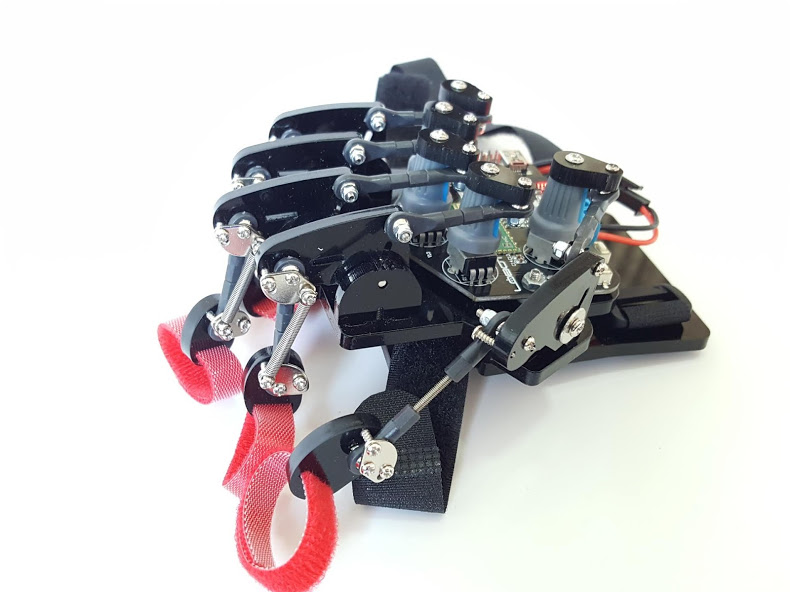
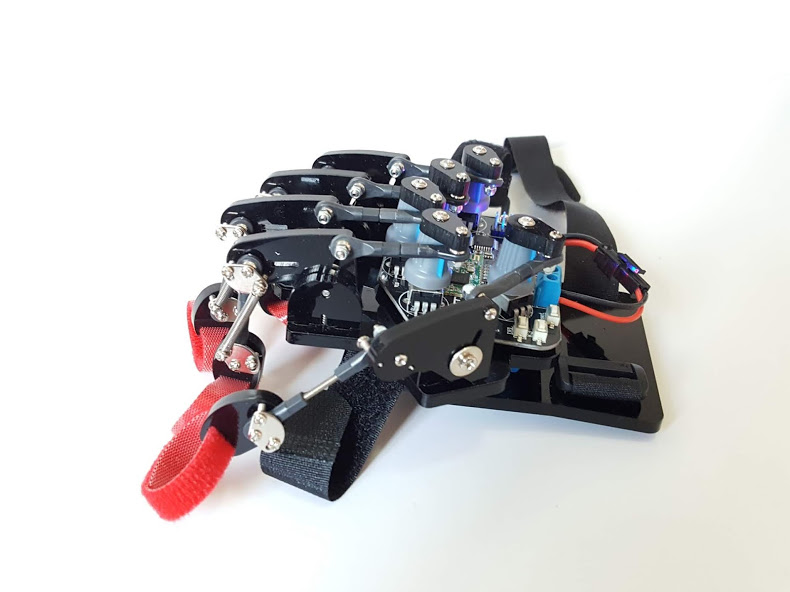
- exoskeleton arm เชิงกล ติดตั้ง Potentiometer
User Manual Open Source Robotic Glove
- https://www.dropbox.com/s/nh8uj6ulgt6e26u/Open%20Source%20%20Robotic%20Glove%20User%20%20Manual%20.pdf?dl=0
ไฟล์ไลบรารีที่เกี่ยวข้อง (จำเป็นต้องโหลดไลบรารี่ก่อนดาวน์โหลดโปรแกรม)
- I2C dev / Servo Control/MPU6050
- https://www.dropbox.com/sh/m1c30ckym64bd92/AABmFlRGfO4_HxIPhmW_B5MJa?dl=0
ตัวอย่างโค้ด Arduino UNO
- https://www.dropbox.com/sh/pie7odbps14y4lb/AACtBKwx-etMNcJiCMuxNYsYa?dl=0
#include <SoftwareSerial.h> #include "LobotServoController.h" #include "I2Cdev.h" #include "MPU6050.h" #include "Wire.h"




รีวิว
ยังไม่มีบทวิจารณ์