คำอธิบาย
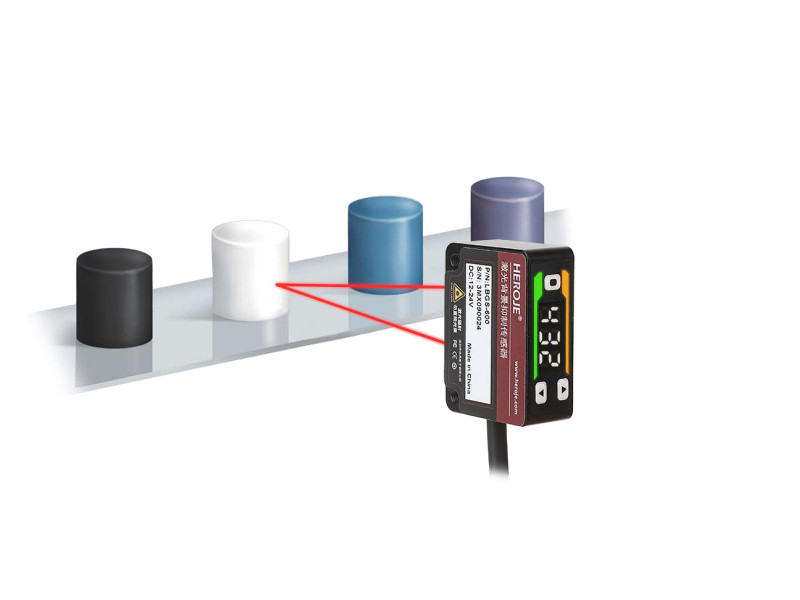
เลเซอร์วัดระยะ Measurement Laser Displacement Sensor LBGS series เป็นเซนเซอร์เลเซอร์ CMOS ที่มีระบบป้องกันพื้นหลังที่สามารถตรวจจับวัตถุโดยอิงจากตำแหน่งหรือความคมชัด ทำให้สามารถตรวจจับเป้าหมายที่เป็นโลหะ เป้าหมายที่โปร่งใส และมีการสอน teach ด้วยปุ่มเดียวทำให้ใช้งานง่าย
TECHNICAL PARAMETERS
- Power Voltage 5 to 24 V DC ±10 %, Ripple P-P 10 % or less
- Power Consumption 450mW or less (18 mA or less at 24 V, 34 mA or less at 12 V)
- Light Source Red laser (660 nm) Class 1 laser product (IEC60825-1, FDA (CDRH) Part1040.10)
- Spot Size φ3mm
- Response Time 1.5ms / 10ms / 50ms selectable
- Input External NPN input • Input conditions 60mA or less / 7-24V
- Enclosure Rating IP64
- Cable 6-core composite cable, 2m
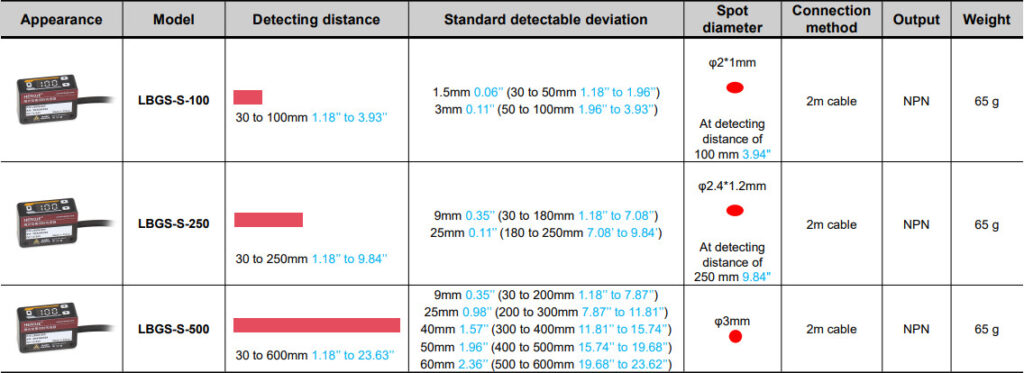
ช่วงการวัด Detecting distance
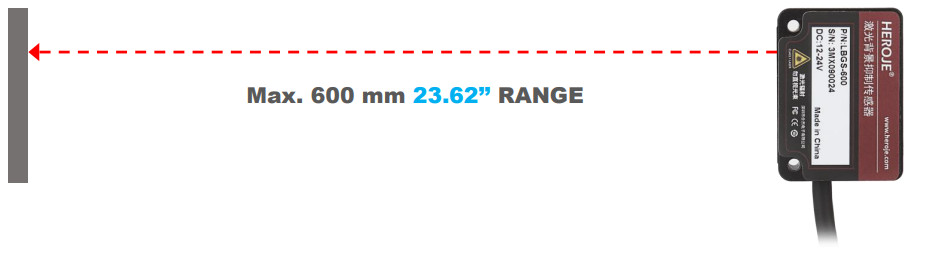
LBGS-S-500 30 to 600 mm
Output
-
- NPN Open Collector
Applications
ฟังก์ชันปรับแต่งพื้นหลังทำให้การตรวจจับวัตถุแม่นยำ
เลเซอร์เซ็นเซอร์ตรวจจับวัตถุ บันทึกระยะทางและความเข้มของแสงไปยังพื้นหลังอ้างอิง เมื่อวัตถุเข้าสู่พื้นที่ตรวจจับ หากระยะทางหรือความเข้มของแสงเปลี่ยนแปลงไปจากสถานะที่บันทึกไว้ วัตถุจะถูกตรวจจับ หากมีพื้นหลัง การตรวจจับที่แม่นยำสามารถทำได้แม้ว่ารูปร่างจะซับซ้อน สีหรือสภาพพื้นผิวของวัตถุจะเปลี่ยนแปลง และแม้แต่วัตถุบางๆ ที่อยู่ต่ำกว่าค่าเบี่ยงเบนที่ตรวจจับได้ก็สามารถตรวจจับได้อย่างเสถียร
การตรวจจับวัตถุโปร่งใส
การเปลี่ยนแปลงความเข้มของแสงสามารถทำได้โดยใช้ “Background Tuning” โดยการตรวจจับการเปลี่ยนแปลงความเข้มของแสงของพื้นหลังที่ registered ไว้ จะสามารถตรวจจับวัตถุโปร่งใสได้ แม้ว่าจะเป็นประเภทการตั้งค่าระยะทาง มีการจัดการกับเป้าหมายโปร่งใสแม้ว่าจะมีพื้นหลัง
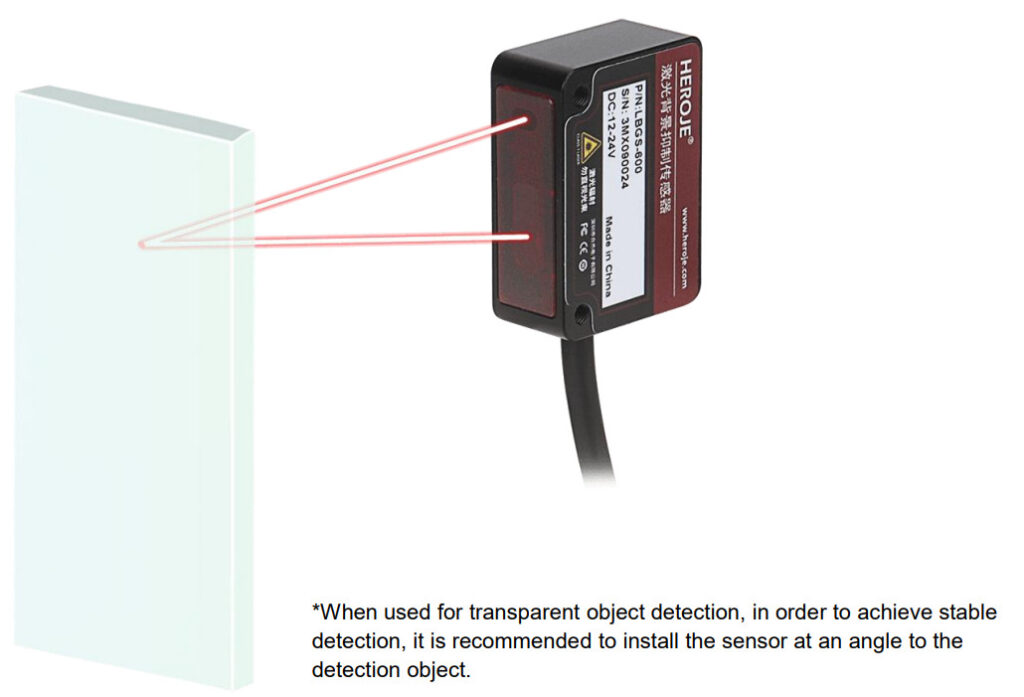
*เมื่อใช้ตรวจจับวัตถุโปร่งใส เพื่อให้การตรวจจับมีเสถียรภาพ แนะนำให้ติดตั้งเซ็นเซอร์ในมุมเอียงกับวัตถุที่จะตรวจจับ
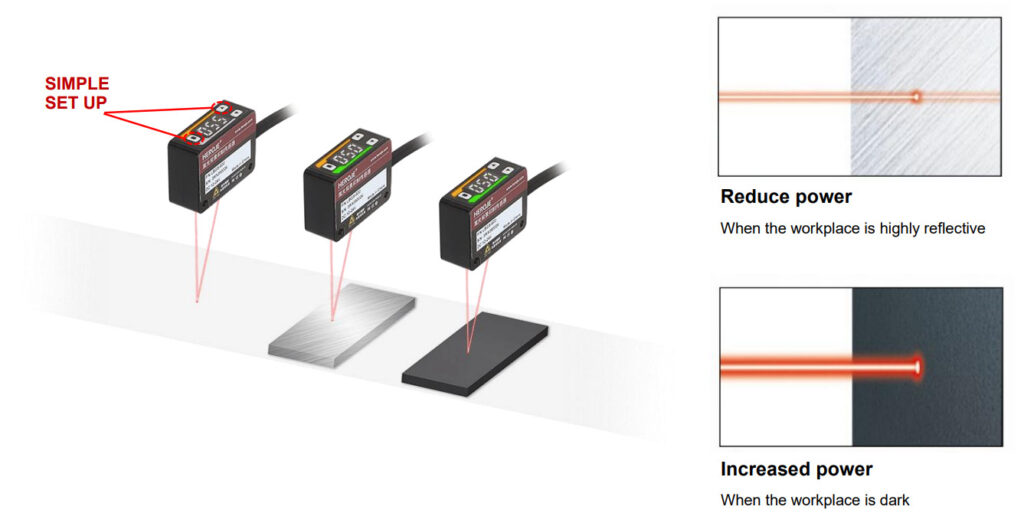
Simplified Operation
การตั้งค่าอย่างง่ายเพียง 3 ปุ่ม

Position Based Detection
การตรวจจับตามตำแหน่ง สามารถตรวจจับเป้าหมายโดยไม่คำนึงถึงรูปร่าง สี หรือพื้นผิว โดยไม่ต้องใช้รีเฟลกเตอร์ การตรวจจับสามารถตรวจจับได้ไกลถึง 600 มม. สามารถทำได้แม้ในระยะไกลและเมื่อติดตั้งในมุมเอียง
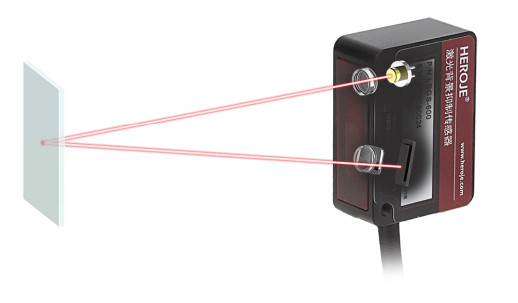
Triangulation Algorithm Based Laser Sensor
การหาตำแหน่งแบบสามเหลี่ยมเป็นหนึ่งในหลักการตรวจจับของเซนเซอร์การเคลื่อนที่ แสงจากตัวส่งแสงจะกระทบกับเป้าหมาย และแสงที่สะท้อนจะเข้าสู่ตัวรับ เซนเซอร์ภาพ CMOS ที่ประกอบด้วยองค์ประกอบรับแสงหลายตัวจะติดตั้งอยู่ในตัวรับ การเปลี่ยนระยะห่างจากเป้าหมายจะทำให้ตำแหน่งสูงสุดของรูปคลื่นแสงที่รับได้บนเซนเซอร์ภาพ CMOS เปลี่ยนไป จึงสามารถคำนวณระยะห่างไปยังเป้าหมายได้
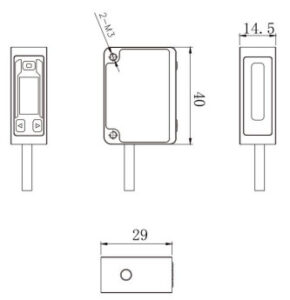
Dimension
Pinout



รีวิว
ยังไม่มีบทวิจารณ์