
คำอธิบาย
อินเวอร์เตอร์ Inverter 3 Phase VFD อินเวอร์เตอร์คอนโทรลเลอร์ สามารถตั้งค่าฟังก์ชันเส้นโค้ง V/F ได้ตามต้องการ Inverter (VFD – Variable Frequency Drive) ขนาดเล็ก ใช้สำหรับปรับความเร็วรอบมอเตอร์ โดยแปลงไฟ Single Phase 220V → Three Phase 220V
จุดเด่น
- มีพอร์ต I/O ครบ: FWD/REV, Analog In/Out, Relay Output
- ฟังก์ชัน Multi-Speed, Jog, PID Control ในตัว
- ช่วงความถี่กว้าง 0–400Hz และตั้งค่า Accel/Decel ได้ถึง 6000s
คุณสมบัติ
- UX-52 MCU Inverter
- Motor Power: 0.75 kW (≈ 1 HP) → ใช้กับมอเตอร์ไฟฟ้าขนาดเล็กถึงกลาง
- Input Voltage: 220V 1 เฟส
- Output Voltage: 220V 3 เฟส
- Rated Current: 4A
- Output Frequency: 0.1 ~ 400 Hz → ใช้ปรับความเร็วรอบมอเตอร์ได้กว้าง
- Rated Frequency: 50/60 Hz (input)
- Installation: Embedded → ฝังติดในตู้หรือแผงควบคุม
การใช้งาน
ใช้กับ มอเตอร์เหนี่ยวนำ 3 เฟส ขนาดไม่เกิน 0.75 kW (1 HP) เหมาะกับงาน:
- พัดลม / ปั๊มน้ำขนาดเล็ก
- มอเตอร์สายพานลำเลียง
- เครื่องจักรอัตโนมัติที่ต้องการปรับสปีด
- ควบคุมความเร็วได้ละเอียดเพราะรองรับ 0.1–400 Hz
⚠️ สิ่งที่ควรระวัง
- โหลดไม่ควรเกิน 0.75 kW มิฉะนั้นจะทำให้ Inverter ร้อนหรือตัดการทำงาน
- เนื่องจาก เคสเป็น ABS Plastic → ต้องติดตั้งในตู้ควบคุม (กันไฟ/ความชื้น)
- ไม่ควรใช้กับ มอเตอร์ซิงโครนัส หรือมอเตอร์ที่มี Brake Unit หากไม่ได้ออกแบบมาสำหรับ VFD
Dimensions

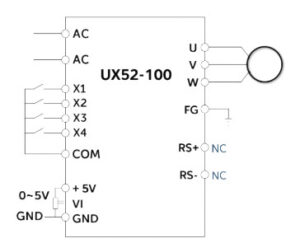
Main Control Circuit Terminals Wiring
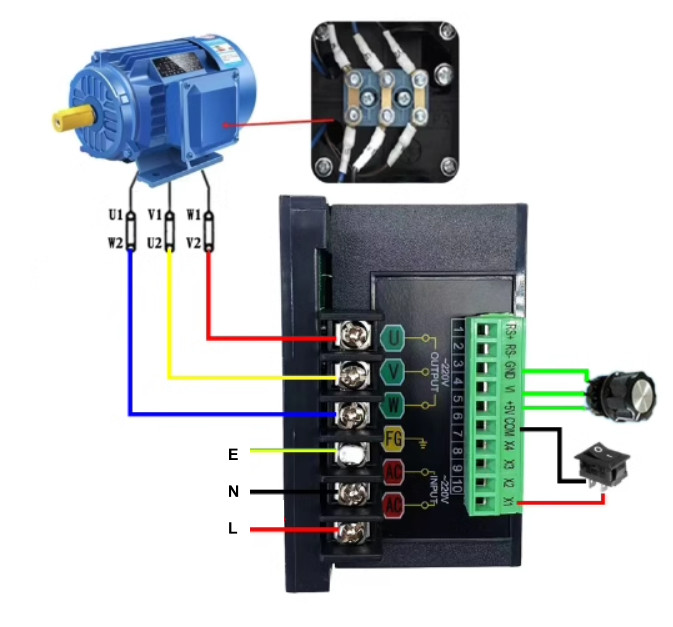
หมายเหตุ
- Potentiometer แนะนำให้ใช้ค่า 5.1 kΩ, 2W
- Brake Function / RS485 Function เป็น (Optional) เสริม
Power Terminal
- AC L = AC 220V Voltage Input
- AC N = AC 220V Voltage Input
- FG = Ground Wire
- U = 3 Ph Motor Phase U
- V = 3 Ph Motor Phase V
- W = 3 Ph Motor Phase W
Control Terminal
- –
- –
- GND
- V1 Speed Control potentiometer input terminal
- +5V
- COM
- X4
- X3
- X2
- X1
องค์ประกอบหลัก
-
หน้าจอแสดงผล (LED 8-segment สีแดง)
ใช้แสดงสถานะการทำงาน, รหัสฟังก์ชัน, ค่าพารามิเตอร์ และรหัส Fault
ปุ่มควบคุม (Key Functions):
-
- PROG/ESC → เข้าสู่เมนูตั้งค่า / ออก
- ▲ / ▼ → เลือกโค้ดฟังก์ชัน หรือปรับค่าเพิ่ม/ลด
- OK → ยืนยันค่าและบันทึกลงหน่วยความจำ (E2PROM)
- RUN → สั่งเดินเครื่อง (สำหรับ JH-100: กดค้าง >3 วินาทีเพื่อ Reverse)
- STOP/RESET → หยุดการทำงาน หรือรีเซ็ตเมื่อเกิด Fault
- SHIFT → เลื่อนตำแหน่งตัวเลข หรือเปลี่ยนโหมดแสดงผล
- REV → ปุ่มกลับทาง (Reverse)
ปุ่มหมุน Potentiometer (ในบางรุ่น)
ใช้สำหรับปรับความถี่โดยตรง (Setting Frequency)
ตัวอย่างการใช้งาน
- หมุน/หยุด/กลับทาง → กด RUN, STOP, REV ได้จากแผงควบคุม
- ตั้งค่าพารามิเตอร์ → ใช้ PROG → OK → ▲/▼ → OK เพื่อบันทึกค่า
- Reset Fault → กด STOP/RESET เมื่อมีการแจ้งเตือน
Table 2-1 Key features ปุ่มควบคุมหลัก
| ปุ่ม (Button) | ฟังก์ชัน (Function) |
|---|---|
| PROG / ESC | เข้าสู่เมนูตั้งค่าพารามิเตอร์ หรือออกจากเมนู |
| ▲ Increase | เลื่อนโค้ดฟังก์ชันขึ้น / เพิ่มค่าพารามิเตอร์ |
| ▼ Down | เลื่อนโค้ดฟังก์ชันลง / ลดค่าพารามิเตอร์ |
| OK (Memory) | ยืนยันและบันทึกค่าลงในหน่วยความจำ (E2PROM) |
| RUN | กดเพื่อสั่งเดินเครื่อง (Run) → สำหรับ JH-100: กดค้าง >3 วินาที เพื่อ Reverse |
| STOP / RESET | สั่งหยุดการทำงานตามเวลาหน่วง หรือรีเซ็ตเมื่อเกิด Fault |
| SHIFT | เลื่อนตำแหน่งตัวเลขในการตั้งค่า / ใช้เรียกดูโหมดแสดงผล (Display options [P091]) |
| REV | ปุ่มสั่งกลับทางโดยตรง (เฉพาะบางรุ่น แต่ใน JH-100 ส่วนใหญ่ใช้ RUN ค้างแทน) |
Function Code พารามิเตอร์หลัก
- https://docs.google.com/spreadsheets/d/1Z3zI-8smVqY56Oz3vs4J4Yk_ZoacGugqYmgc4oB3AQA/edit?usp=sharing
ความผิดพลาดและการป้องกัน (Fault & Protection)
4.1 ฟังก์ชันการป้องกัน
กระแสเกิน / โมดูล IGBT เสียหาย (001)
→ หากกระแสสูงกว่า 200% ของค่าพิกัด หรือโมดูลภายในลัดวงจร อินเวอร์เตอร์จะหยุดทำงานทันที
แรงดันตกชั่วขณะ (002)
→ หากไฟฟ้าดับหรือแรงดันต่ำกว่าค่าที่กำหนด (220V < 170V) จะหยุดทำงาน
แรงดันสูงเกิน (003)
→ หากไฟขณะชะลอความเร็วสูงเกิน เช่น > 400V จะหยุดทำงาน
อุณหภูมิเกิน (004)
→ อุณหภูมิภายในเครื่อง > 85°C จะตัดการทำงาน
โหลดเกิน (005)
→ โหลดใช้งานเกิน 150% ของค่าพิกัดเกิน 1 นาที อินเวอร์เตอร์จะตัด
4.2 รหัสความผิดพลาด (Error Codes)
001 กระแสเกิน
- ระหว่างเร่ง/ลดความเร็ว มีโหลดกระชาก
- การตั้งค่าเวลาเร่ง/ลดสั้นเกินไป แนวทาง: เพิ่มเวลาเร่ง/ลด หรือใช้มอเตอร์ที่เหมาะสม
ตัวอย่างการใช้งาน (Application Examples)
| กรณี | ค่า Parameter | คำอธิบาย |
|---|---|---|
| กรณีที่ 1 ควบคุมด้วยปุ่มหน้าปัด + ใช้โพเทนชิโอมิเตอร์บนหน้าปัดปรับความเร็ว (0–65Hz) |
P003=65.0 P004=65.0 P005=65.0 |
จำกัดความถี่สูงสุดที่ 65Hz ถ้าต้องการมากกว่านี้ควรใช้มอเตอร์อินเวอร์เตอร์โดยตรง |
| กรณีที่ 2 อินเวอร์เตอร์มีอาการไฟตกที่ความถี่ต่ำ |
P014=2–10 P015=1–3 |
ปรับค่าแรงบิดเริ่มต้น/ค่าสำรองให้ทำงานที่ความถี่ต่ำได้เสถียร |
| กรณีที่ 3 ควบคุมทิศทางหมุนด้วยสวิตช์ภายนอก (เดินหน้า/ถอยหลัง) + โพเทนชิโอมิเตอร์ปรับความเร็ว (0–50Hz) |
P001=0 P022=1 P023=2 |
กำหนดโหมดควบคุม: P001=0 (สัญญาณภายนอก), P022=1 (เดินหน้า), P023=2 (ถอยหลัง) |
| กรณีเพิ่มเติม (3B) ควบคุมเดินหน้า/ถอยหลัง/หยุดด้วยปุ่ม SB1–SB3 |
P001=0 P022=1 P023=2 P025=3 P097=2 |
– SB1 เดินหน้า (NO contact) – SB2 ถอยหลัง (NO contact) – SB3 หยุด (NC contact) |
| กรณีที่ 4 ควบคุมการทำงานอินเวอร์เตอร์ด้วยสวิตช์ภายนอก + โพเทนชิโอมิเตอร์ภายนอก (2–10KΩ) |
P001=0 P002=0 |
– K1 = Start/Stop – โพเทนชิโอมิเตอร์ภายนอกปรับ 0–50Hz |
| กรณีที่ 5 สปินเดิลมอเตอร์เครื่องแกะสลัก (220V / 1.5kW / 400Hz / 24,000rpm) ควบคุมด้วยการ์ด |
P001=0 P002=2 P003–P006=400.0 P015=6 P022=10 P023=11 P024=12 P025=1 P028=1 P030=100.0 P031=150.0 P032=200.0 P033=250.0 P034=300.0 P035=350.0 P036=400.0 |
– X1 = ความเร็วต่ำ – X2 = ความเร็วกลาง – X3 = ความเร็วสูง – X4 = Start – COM = ขั้วร่วม |
ตารางการแก้ไขปัญหา (Troubleshooting Guide)
| อาการ | สาเหตุ | วิธีแก้ |
|---|---|---|
| มอเตอร์หมุนย้อน | สลับสาย U,V,W ผิด | สลับลำดับการต่อสาย |
| มอเตอร์ร้อน / เสียงดัง | โหลดเกิน, ค่าพารามิเตอร์ไม่ถูกต้อง | ลดโหลด, ปรับพารามิเตอร์ |
| มอเตอร์เร่ง/ลดเร็วเกิน | เวลาเร่ง/ลดตั้งค่าสั้นไป | เพิ่มเวลา Acc/Dec |
| ความเร็วไม่ตรงกับค่าที่ตั้ง | เซ็นเซอร์/สัญญาณไม่ถูกต้อง | ตรวจสอบสัญญาณ / Encoder |
Datasheet


รีวิว
ยังไม่มีบทวิจารณ์