
คำอธิบาย
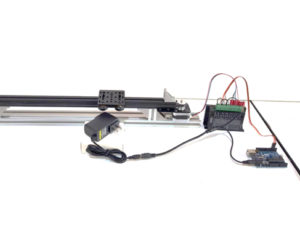
ชุดรางเลื่อนสไลด์ สายพานไทม์มิ่งขับ Gantry linear rail guide precision High-speed 45X 2-Axis 3XY
- HTD3M-W15mm Timing Belt Synchronous Timing Pulleys HTD3M-24T Drive
- ความกว้างราง 45mm
- ระยะชัก Effective Stroke 2000mm
- ความยาวรางเลื่อน 2100mm
- ความยาวรวม 2240mm
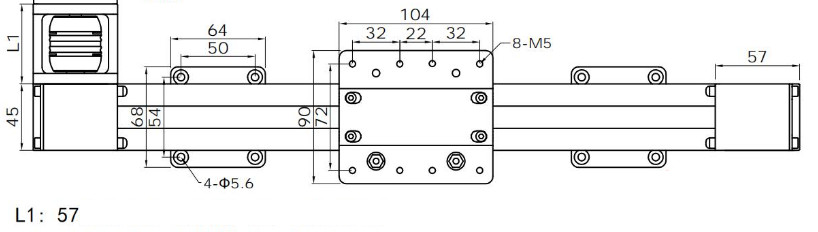
- แป้นยึด 100mm กว้าง 90mm
- Accuracy (0.1mm ~ 0.2mm)/500mm
- Accuracy Positioning 0.26mm
- Max Speed 300mm/Sec
- Torque 0~3Nm
- Maximum Load
- Horizontal 20Kg
- Vertical 10kg
- Rail Material Aluminum Alloy
- Suitable Nema23/34, 57/86 Step motor, 200W Servo motor, 400W Servo motor
3D File
Dimension
ในชุดประกอบด้วย
อุปกรณ์แมคคานิค 2XY
- 2pcs x LSBI01-2 X Axis High Speed Stepping Motor Linear Slide Timing Belt 45X2000
- 1pcs x LSBF01-2 Y Axis High Speed Stepping Motor Linear Slide Timing Belt 45X1500
- 2 Set x CSX607 คัปปลิ้ง ข้อต่อเพลา ตรงอลูมิเนียม Diaphragm Coupling D34L33-12x12mm
- 1 pcs x ST12X2 แกนเพลาสแตนเลส Stainless Steel Linear Shafts Diameter12mm length 140cm
- 2 Set x LSTB97 45X XY Cross Connection Plate L
อุปกรณ์ไฟฟ้า
- 2pcs x MT2338 Stepper Motor 2.8Nm
- 2pcs x DMST09 ไดรเวอร์ สเต็ปเปอร์มอเตอร์ Driver Stepper Motor DC20-50V/5.6A DM556
- 1pcs x PS2410 Switching Power Supply 24V/10A
- 1pcs x CBA205 AC Power Cord
- 1pcs x CNT112 คอนเนคเตอร์ เทอร์มินอลไฟฟ้า แบบสกรู Screw Terminal Block 12CH TB1512 15A/600V
- 1pcs x BDMC03 บอร์ดอาดูโน่ Arduino Uno R3 Compatible ATMEGA328-U SMD CH340 USB Cable
ควบคุมด้วยอาดูโน่ มี Source Code ให้นำไปแก้ไขและพัฒนาต่อได้ ทำการถอดแยกชิ้นเพื่อให้สะดวกในการขนส่ง
Arduino Code
#include <AccelStepper.h>
#include <Servo.h>
// Define some steppers and the pins the will use
// Step, Direction
AccelStepper stepper1(AccelStepper::FULL2WIRE, 5, 2);// pin5 ส่งพัลส์ pin2 กำหนดทิศทาง
AccelStepper stepper2(AccelStepper::FULL2WIRE, 6, 3);// pin6 ส่งพัลส์ pin3 กำหนดทิศทาง
AccelStepper stepper3(AccelStepper::FULL2WIRE, 7, 4);// pin7 ส่งพัลส์ pin4 กำหนดทิศทาง
Servo myservo; // create servo object to control a servo
// กำหนดขาที่ต่อกับลิมิตสวิตช์
#define home_switch_stepper1 9 // Pin D9 connected to Home Switch (MicroSwitch)
#define home_switch_stepper2 10 // Pin D10 connected to Home Switch (MicroSwitch)
#define home_switch_stepper3 12 // Pin D12 connected to Home Switch (MicroSwitch)
// Stepper Travel Variables
long TravelX;
int move_finished = 1; // Used to check if move is completed
long initial_homing = -1; // Used to Home Stepper at startup
int step = 0;
void setup(){
Serial.begin(9600); // Start the Serial monitor with speed of 9600 Bauds
pinMode(home_switch_stepper1, INPUT_PULLUP);
pinMode(home_switch_stepper2, INPUT_PULLUP);
pinMode(home_switch_stepper3, INPUT_PULLUP);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
pinMode(A2, INPUT_PULLUP);
pinMode(A3, OUTPUT);// Gripper
pinMode(11, INPUT_PULLUP);
digitalWrite(A0,HIGH);// conveyor OFF
digitalWrite(A1,HIGH);// conveyor OFF
digitalWrite(A3,HIGH);// Gripper open
pinMode(8, OUTPUT);
digitalWrite(8,HIGH);// สั่งให้ไดร์เวอร์ ON
delay(5); // Wait for driver wake up
stepper1.setCurrentPosition(0); // เมื่อชนลิมิตสวิตช์แล้ว เซตค่าให้ตำแหน่งนี้เป็น 0
stepper1.setMaxSpeed(10000.0); // ตั้งค่าความเร็วใช้งานภายหลังการเข้า home แล้ว
stepper1.setAcceleration(3000.0); // ตั้งค่าความเร่ง
stepper2.setCurrentPosition(0); // Set the current position as zero for now
stepper2.setMaxSpeed(10000.0); // Set Max Speed of Stepper (Slower to get better accuracy)
stepper2.setAcceleration(5000.0); // Set Acceleration of Stepper
stepper3.setCurrentPosition(0); // Set the current position as zero for now
stepper3.setMaxSpeed(10000.0); // Set Max Speed of Stepper (Slower to get better accuracy)
stepper3.setAcceleration(5000.0); // Set Acceleration of Stepper
}
void loop(){
stepper3.runToNewPosition(1000); // z
stepper1.runToNewPosition(40000); // y
stepper2.runToNewPosition(30000); // x
delay(1000);
stepper3.runToNewPosition(0); // z
stepper1.runToNewPosition(0); // y
stepper2.runToNewPosition(0); // x
delay(1000);
}
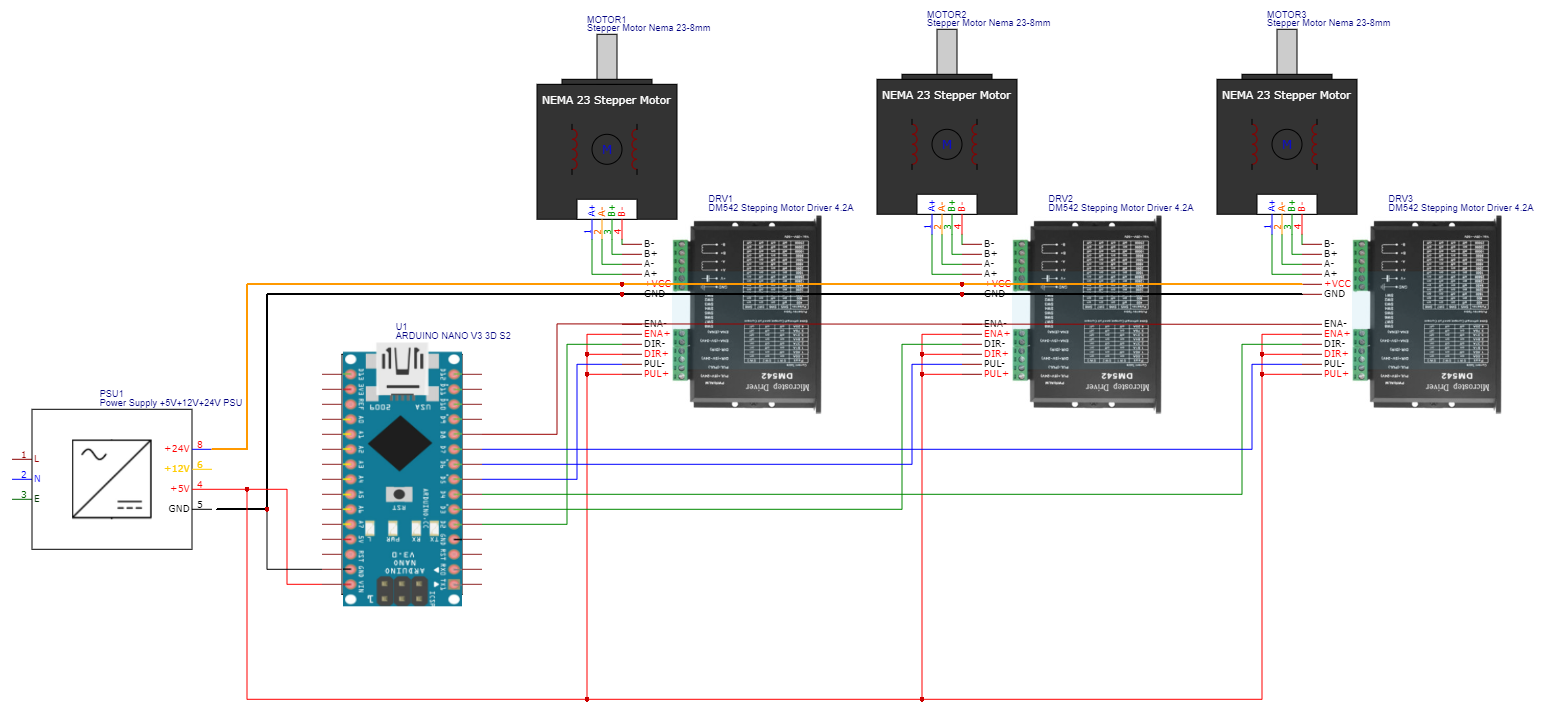
Wiring
https://oshwlab.com/s2insupply/gantry-linear-rail-guide-precision-high-speed-45x-2-axis-xy-2000×1500

รีวิว
ยังไม่มีบทวิจารณ์