
คำอธิบาย
ไดรเวอร์สเต็ปเปอร์รุ่น DM542 รองรับแรงดันสัญญาณพัลส์กว้าง ใช้งานง่าย เสถียร เหมาะกับงานอุตสาหกรรมและระบบออโตเมชันที่ต้องการความละเอียดสูงและความทนทานต่อสภาพไฟไม่เสถียร
คุณสมบัติเด่น
- รองรับสัญญาณพัลส์ 5V / 24V โดยไม่ต้องใช้ตัวต้านทานอนุกรม
- รองรับ Microstep สูงสุด 25,600 steps/รอบ ให้การเคลื่อนที่นุ่มและละเอียด
- กระแสขับสูงสุด 4.2A รองรับมอเตอร์ NEMA17 / NEMA23 ได้หลากหลาย
- มีระบบป้องกันครบ: Overcurrent, Overtemperature, Short Circuit
- รองรับสัญญาณ Enable (ENA) สำหรับฟังก์ชัน Offline / Disable มอเตอร์
- ออกแบบมาสำหรับสภาพแวดล้อมไฟฟ้าที่ไม่เสถียร ใช้งานจริงในโรงงานได้
Stepper Motor Driver Specification
- แรงดันไฟเลี้ยง (Working Voltage) DC 20 – 50V
- กระแสเอาต์พุตสูงสุด (Rated Max Output Current) 4.2A
- รองรับมอเตอร์
- Stepper Motor แบบ 2-Phase / 4-Phase
- Stepper Motor แบบ 4 สาย และ 6 สาย
โหมดการขับ (Step Mode):
- Half-Step, 1/8 Step, 1/16 Step
- Micro Step: 1, 2/A, 2/B, 4, 8, 16, 32
- อินเทอร์เฟซ: ความเร็วสูงแบบ Optocoupler Isolation
คุณสมบัติด้านความปลอดภัย:
- ระบบป้องกันสัญญาณรบกวนและความถี่สูง
- ป้องกันการต่อกลับขั้ว (Anti-Reverse)
- ป้องกันความร้อนสูงเกิน (Over Temperature)
- ป้องกันกระแสเกิน (Over Current)
- ป้องกันการลัดวงจร (Short Circuit Protection)
- การออกแบบ: มาพร้อมแผ่นระบายความร้อนในตัว
ตารางการตั้งค่า SW1-SW4 (กระแส + Idle) ของ DM542
| SW1 | SW2 | SW3 | Peak Current | RMS Current | ความหมาย / หมายเหตุ |
|---|---|---|---|---|---|
| ON | ON | ON | ~ 1.00 A | ~ 0.71 A | กระแสต่ำสุด |
| OFF | ON | ON | ~ 1.46 A | ~ 1.04 A | — |
| ON | OFF | ON | ~ 1.91 A | ~ 1.36 A | — |
| OFF | OFF | ON | ~ 2.37 A | ~ 1.69 A | — |
| ON | ON | OFF | ~ 2.84 A | ~ 2.03 A | — |
| OFF | ON | OFF | ~ 3.31 A | ~ 2.36 A | — |
| ON | OFF | OFF | ~ 3.76 A | ~ 2.69 A | — |
| OFF | OFF | OFF | ~ 4.20 A | ~ 3.00 A | กระแสสูงสุดที่ไดรเวอร์รองรับในรุ่นนี้ |
SW4:
| SW4 | ผลของ Idle / Standstill current |
|---|---|
| OFF | ใช้ประมาณ ~50% ของ dynamic current หลังจากไม่มี pulse มาเป็นเวลา 0.4 วินาที (ความร้อนลด) |
| ON | ใช้กระแสเต็ม (100%) ตลอดแม้หยุดนิ่ง |
ตาราง Microstep ของ DM542 (สำหรับมอเตอร์ 1.8°)
| SW5 | SW6 | SW7 | SW8 | Microstep (per step) | Total Steps/Rev |
|---|---|---|---|---|---|
| ON | ON | ON | ON | 400 | 200 × 2 = 400 |
| OFF | ON | ON | ON | 800 | 200 × 4 = 800 |
| ON | OFF | ON | ON | 1600 | 200 × 8 = 1600 |
| OFF | OFF | ON | ON | 3200 | 200 × 16 = 3200 |
| ON | ON | OFF | ON | 6400 | 200 × 32 = 6400 |
| OFF | ON | OFF | ON | 12800 | 200 × 64 = 12800 |
| ON | OFF | OFF | ON | 25600 | 200 × 128 = 25600 |
| OFF | OFF | OFF | ON | 51200 | 200 × 256 = 51200 |
| ON | ON | ON | OFF | 1000 | 200 × 5 = 1000 |
| OFF | ON | ON | OFF | 2000 | 200 × 10 = 2000 |
| ON | OFF | ON | OFF | 4000 | 200 × 20 = 4000 |
| OFF | OFF | ON | OFF | 5000 | 200 × 25 = 5000 |
| ON | ON | OFF | OFF | 8000 | 200 × 40 = 8000 |
| OFF | ON | OFF | OFF | 10000 | 200 × 50 = 10000 |
| ON | OFF | OFF | OFF | 20000 | 200 × 100 = 20000 |
| OFF | OFF | OFF | OFF | 25000 | 200 × 125 = 25000 |
วิธีเลือกค่าที่เหมาะสม
- ถ้าต้องการ ความละเอียดไม่สูง แต่เร็ว → ใช้ 400 หรือ 800 step/rev (2 หรือ 4 microstep)
- ถ้าต้องการ บาลานซ์ระหว่าง smooth และ speed → ใช้ 1600 หรือ 3200 step/rev (8–16 microstep)
- ถ้างาน ต้องการความละเอียดสูง เช่น CNC, 3D Printer, Positioning → 6400 ขึ้นไป (32 microstep)
- ถ้าเลือกสูงเกินไป เช่น 25600 หรือ 51200 step/rev → motion smooth มาก แต่ต้องใช้ pulse rate จาก controller สูงตามไปด้วย (บาง PLC/MCU ส่ง pulse ไม่ทัน)
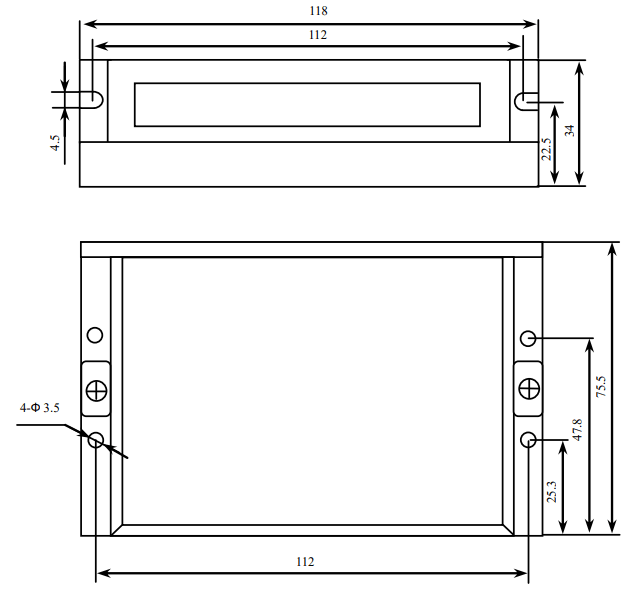
Dimension




รีวิว
ยังไม่มีบทวิจารณ์