คำอธิบาย
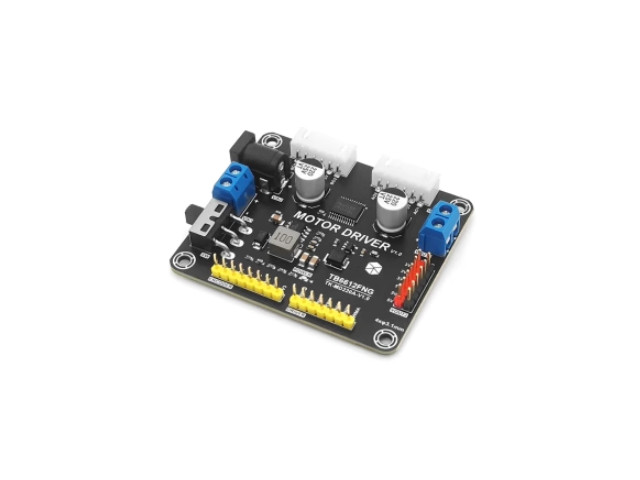
โมดูลขับมอเตอร์ TB6612
- ชิปรุ่น TB6612FNG
- แพ็กเกจชิป SSOP24
- แรงดันไฟขาเข้า VM 5.5V ~ 15V
- ความถี่ PWM Output 0 ~ 100 kHz
- จำนวนช่องขับ 2 ช่อง (ขับมอเตอร์ได้ 2 ตัว)
- กระแสต่อเนื่อง 1.2A
- กระแสพีคสูงสุด 3.2A
- ฟังก์ชันป้องกัน ป้องกันกระแสเกิน, ป้องกันความร้อนสูงเกิน
- ขับมอเตอร์ได้ 2 ตัว พร้อมกัน (รองรับ Encoder)
- ใช้ได้ทั้ง ขั้วเสียบ DC และขั้วต่อ Terminal
- ขนาดและรูยึด ตรงกับ Raspberry Pi
- เชื่อมต่อหลายบอร์ดเพื่อควบคุมรถ 2/4/6 ล้อ ได้
เหมาะกับงานควบคุมหุ่นยนต์, รถยนต์ไฟฟ้าเล็ก, ระบบอัตโนมัติที่ต้องการขับมอเตอร์แรงสูงด้วยบอร์ดเล็ก ๆ เช่น Arduino หรือ Raspberry Pi.
Terminal Pin
- E1A / E1B Encoder มอเตอร์ 1 (สัญญาณ A / B)
- E2A / E2B Encoder มอเตอร์ 2 (สัญญาณ A / B)
- ADC ตรวจจับค่า VM (แรงดันไฟเลี้ยงมอเตอร์)
- GND กราวด์
- 5V เอาท์พุต 5V
- 3V3 เอาท์พุต 3.3V
- PWMA PWM ควบคุมความเร็วมอเตอร์ 1
- AIN1 / AIN2 ควบคุมทิศทางมอเตอร์ 1
- STBY ควบคุมโหมดปกติ/สแตนด์บาย
- PWMB PWM ควบคุมความเร็วมอเตอร์ 2
- BIN1 / BIN2 ควบคุมทิศทางมอเตอร์ 2
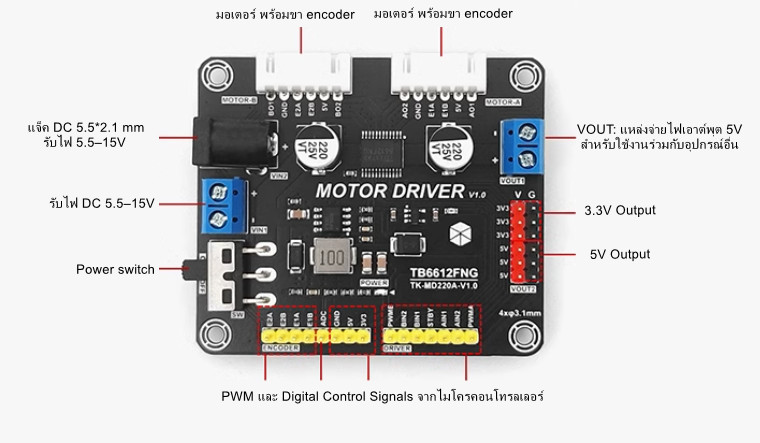
1 .ช่องจ่ายไฟ (Power Input)
- แจ็ค DC 5.5*2.1 mm (รับไฟ 5.5–15V DC)
- VOUT:เอาต์พุต 5V/5A สำหรับใช้งานร่วมกับอุปกรณ์อื่น
2. พอร์ตมอเตอร์ (Motor Port)
- สำหรับต่อมอเตอร์ 2 ตัว (A และ B)
- มีเอาต์พุตสัญญาณควบคุมไปยังมอเตอร์แต่ละตัว
- พร้อมขา encoder (E1A, E1B, E2A, E2B)
3. แถวขาเหลือง (ซ้าย) — Encoder Outputs
- เชื่อมต่อสัญญาณ encoder ของมอเตอร์ A และ B ไปยังไมโครคอนโทรลเลอร์
- ขา: E1A, E1B, E2A, E2B
4. แถวขาแดง (กลางบน) — พอร์ตพลังงาน ใช้จ่ายไฟให้กับวงจรอื่นๆ หรืออุปกรณ์เสริม
- 3.3V/500mA Output
- 5V/5A Output
5. แถวขาเหลือง (ขวา) — Control Input
-
PWM และ Digital Control Signals จากไมโครคอนโทรลเลอร์
PWMA,AIN1,AIN2– สำหรับมอเตอร์ APWMB,BIN1,BIN2– สำหรับมอเตอร์ BSTBY– สำหรับเปิด/ปิดการทำงาน
6.ขาอื่นๆ ที่สำคัญ:
- ADC – ใช้วัดแรงดัน VM
- 3.3V / 5V – ขาเอาต์พุตไฟเลี้ยง (เชื่อมต่อกับบอร์ดควบคุม)
- GND – กราวด์


รีวิว
ยังไม่มีบทวิจารณ์