คำอธิบาย
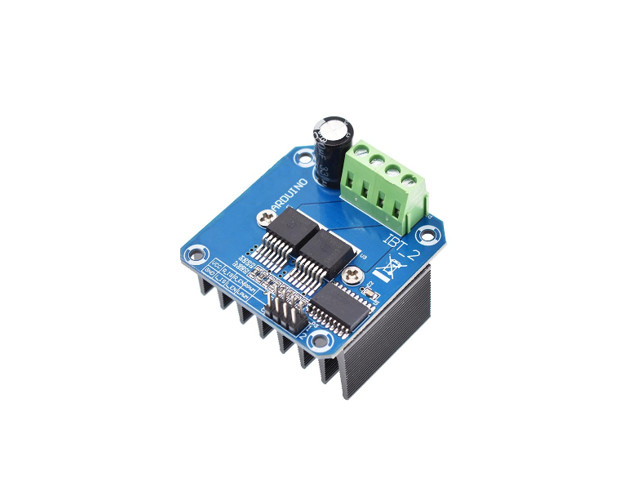
บอร์ดควบคุมความเร็วมอเตอร์กระแสตรงแบบ PWM PWM DC Motor Speed Control
- Double 43A H-bridge drivers
- MCU DC +5V isolated
- 2 PWM inputs highest 25kHz
- Supply voltage DC +6V to 27V
BTS7960/IBT2 Pinout Interface
แหล่งจ่ายไฟ
- B+ ใช้แรงดัน DC6-27V
- B- GND
DC มอเตอร์
- M+ ขั้วบวกมอเตอร์
- M- ขั้วลบมอเตอร์
ขาควบคุม
- VCC DC +5V
- GND
- R_IS ขาเอาต์พุตแสดงสถานะผิดพลาด (Error signal) R
- L_IS ขาเอาต์พุตแสดงสถานะผิดพลาด (Error signal) L
- R_EN ขาอีนาเบิล Active High (DC +5V) R
- L_EN ขาอีนาเบิล Active High (DC +5V) L
- R_PWM ขา PWM ควบคุมความเร็ว R
- L_PWM ขา PWM ควบคุมความเร็ว L
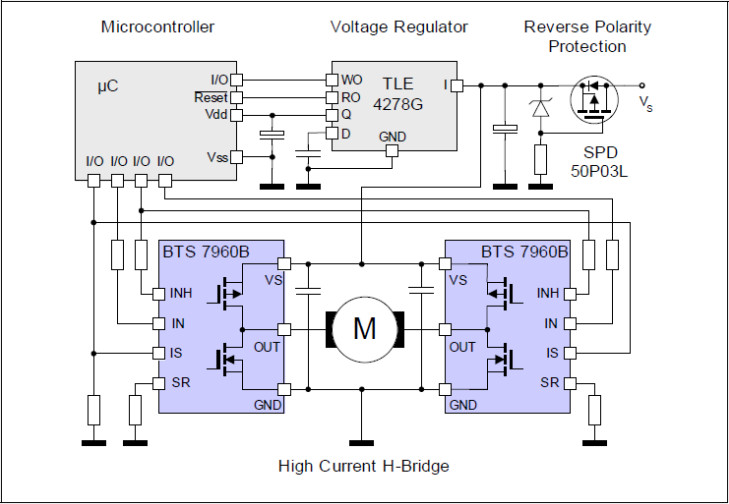
Schematic Diagram
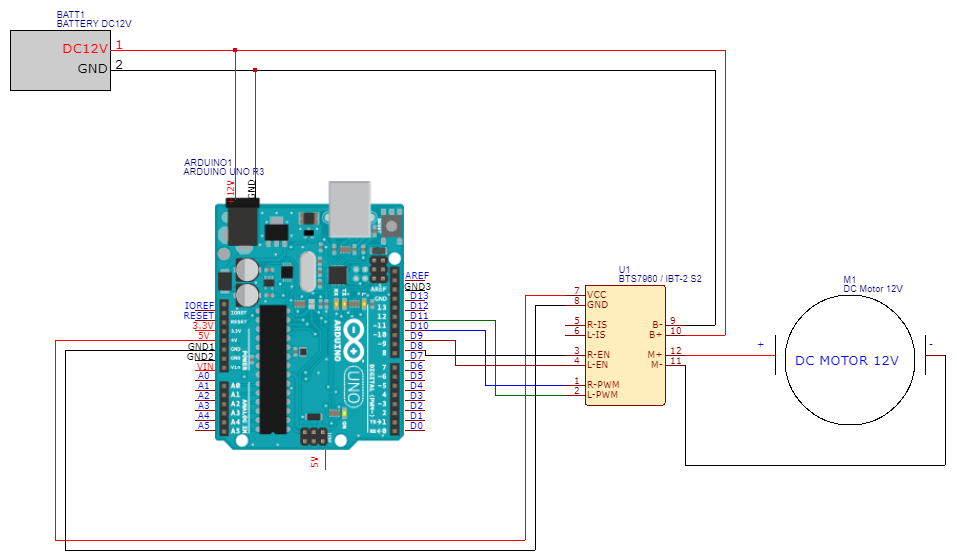
Wiring Diagram
Arduino Example Code
การทดสอบมอเตอร์ ขับซ้ายขวาและหน่วงเวลา 2 seconds
// BTS7960
int IN1 = 8; // R EN
int IN2 = 9; // L EN
int PWM_PIN1 = 10; // R PWM
int PWM_PIN2 = 11; // L PWM
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(PWM_PIN1, OUTPUT);
pinMode(PWM_PIN2, OUTPUT);
}
void loop() {
// Set direction and speed
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
analogWrite(PWM_PIN1, 255);
analogWrite(PWM_PIN2, 0);
delay(2000); // Run for 2 seconds
// Reverse direction and speed
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
analogWrite(PWM_PIN1, 0);
analogWrite(PWM_PIN2, 255);
delay(2000); // Run for 2 seconds
// Stop
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(PWM_PIN1, 0);
analogWrite(PWM_PIN2, 0);
delay(2000); // Wait for 2 seconds before next run
}



รีวิว
ยังไม่มีบทวิจารณ์