
คำอธิบาย
BLDC-38RSS Motor + Gearbox ZGX38RSS
- BLDC-38RSS = ตัวมอเตอร์ BLDC (ใช้ไดรเวอร์ BLDC) มอเตอร์ตัวนี้คือ BLDC + Controller ในตัว
- ZGX38RSS Gearbox = หัวเกียร์ดาว 38mm (เลือกอัตราทดได้หลายค่า)
สเปก
- โครงสร้าง: โลหะ
- แรงรับแนวรัศมี (Radial load): ≤ 8 kgf
- แรงรับแนวแกน (Axial load): ≤ 3 kgf
- แรงกดอินพุตสูงสุด: ≤ 15 kgf
- ระยะคลอนรัศมี: ≤ 0.1 mm
- ระยะคลอนแนวแกน: ≤ 0.4 mm
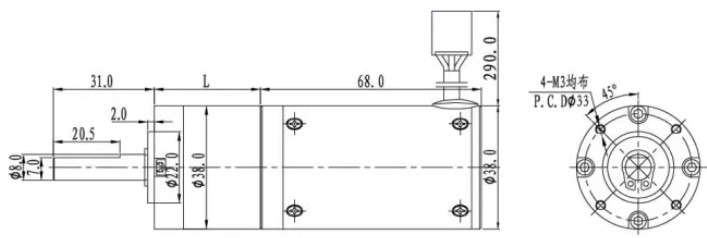
Dimension
รุ่นเกียร์ Output rpm ≈ Motor rpm ÷ Gear ratio
Speed ratio 16–49
| Output speed | อัตราทดโดยประมาณ |
|---|---|
| 200 rpm | ~1:16 |
| 100 rpm | ~1:30 |
| 60 rpm | ~1:49 |
Speed ratio 64–121
| Output speed | อัตราทดโดยประมาณ |
|---|---|
| 60 rpm | ~1:64 |
| 35 rpm | ~1:100–121 |
Speed ratio 256–768
| Output speed | อัตราทดโดยประมาณ |
|---|---|
| 20–25 rpm | ~1:256 |
| 10–15 rpm | ~1:400 |
| 5–7 rpm | ~1:768 |
ใช้งานกับเครื่องจักรทั่วไป/คอนเวเยอร์/มอเตอร์ที่ต้องการฟีดแบ็กตำแหน่งหรือความเร็ว
การเดินสาย (Wiring of Motors) แบบ 6 สาย (6 Wires – 12V / 24V) → ปรับรอบได้
- ให้ต่อสายตามแผนผังการเดินสาย (Wiring Diagram) อย่างเคร่งครัด
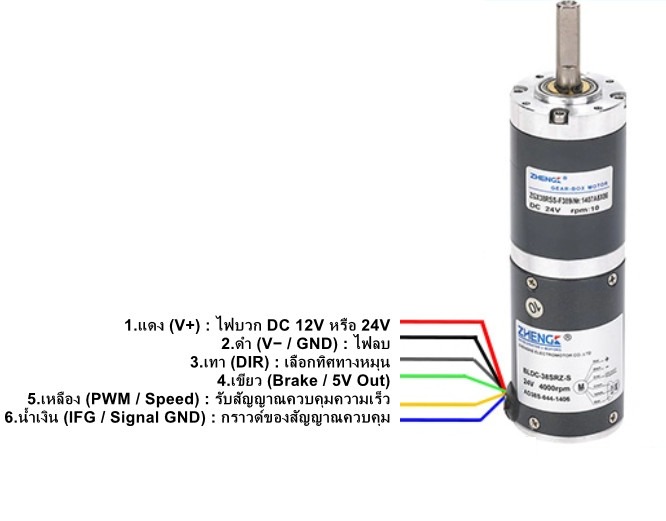
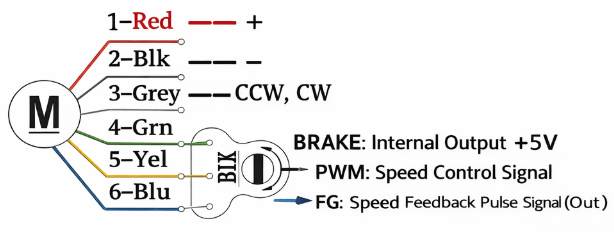
แผนผังการเดินสาย
- แดง (V+) : ไฟบวก DC
- ดำ (V− / GND) : ไฟลบ
- เทา (DIR) : เลือกทิศทางหมุน
- ปล่อยลอย = หมุนทิศหนึ่ง CCW
- ต่อไฟลบ (GND) = กลับทิศ CW
- เขียว (Brake / 5V OUT) :
- เป็น ไฟ 5V ที่มอเตอร์จ่ายออกมาใช้เลี้ยงวงจรปรับรอบ (เช่น VR)
- เหลือง (PWM / Speed) : รับสัญญาณควบคุมความเร็ว (PWM หรือแรงดันควบคุม) ใช้กับ VR, PWM, PLC, Arduino เพื่อคุมความเร็วได้ละเอียด
- น้ำเงิน (IFG / Signal GND) : กราวด์ของสัญญาณควบคุม
ข้อควรระวังสำคัญที่สุด
- ห้ามสลับขั้วไฟ + / − (แดง/ดำ)→ ไดรเวอร์ภายใน ไหม้ทันที ไม่มีฟิวส์กันพลาด
- ห้ามลัดสายเขียว (5V) กับสีน้ำเงิน (GND)→ ช็อตไฟ 5V ภายใน = มอเตอร์พังถาวร
- ห้ามป้อนไฟ 12V/24V เข้าสายควบคุม(เหลือง / เขียว / เทา)→ สายควบคุมรับได้แค่ระดับสัญญาณต่ำ
ตารางแบ่งตาม อัตราทด → ความยาวเกียร์ → จำนวนสเตจ → แรงบิดสูงสุด
| อัตราทด | L (mm) | จำนวนสเตจ | แรงบิดสูงสุด |
| 1/7 | 23.7 | 1 | 2 kgf·cm |
| 1/16 – 1/49 | 32.7 | 2 | 6 kgf·cm |
| 1/64 – 1/196 | 41.7 | 3 | 10 kgf·cm |
| 1/256 – 1/765 | 50.7 | 4 | 15 kgf·cm |
| 1/2141 – 1/3125 | 59.7 | 5 | 20 kgf·cm |



รีวิว
ยังไม่มีบทวิจารณ์