
คำอธิบาย
ชุดทดลองสำหรับเรียนรู้การควบคุมแขนกลด้วย PLC ผ่านการใช้งานสเต็ปปิ้งมอเตอร์ เหมาะสำหรับงานฝึกอบรม งานสอนระบบอัตโนมัติ และการทดลองเขียนโปรแกรมควบคุมตำแหน่งแบบ Step by Step
คุณสมบัติ
- เรียนรู้การใช้งาน PLC ควบคุมแขนกล Robot Arm
- ใช้สเต็ปปิ้งมอเตอร์สำหรับขับเคลื่อนแกนการทำงาน
- ฝึกการควบคุม Stepping Motor ด้วยสัญญาณพัลส์จาก PLC
- รองรับการเรียนรู้ระบบ Homing เพื่อกำหนดตำแหน่งเริ่มต้น
- เรียนรู้การควบคุมตำแหน่ง Position Control
- เหมาะสำหรับการเขียนโปรแกรม Ladder Diagram แบบเป็นขั้นตอน
- รองรับการฝึกใช้งานคำสั่ง STL สำหรับงานควบคุมลำดับการทำงาน
สเปกสินค้า (Specifications)
- ประเภทสินค้า: ชุดเรียนรู้ / ชุดทดลองระบบอัตโนมัติแขนกล
- ระบบควบคุม: PLC
- ระบบขับเคลื่อน: Stepping Motor
- รูปแบบการควบคุม: Pulse Signal Control
- ฟังก์ชันการเรียนรู้: Homing, Position Control, Step Control
- รูปแบบโปรแกรม: Ladder Diagram / STL
- การใช้งานหลัก: ฝึกควบคุมแขนกลด้วย PLC
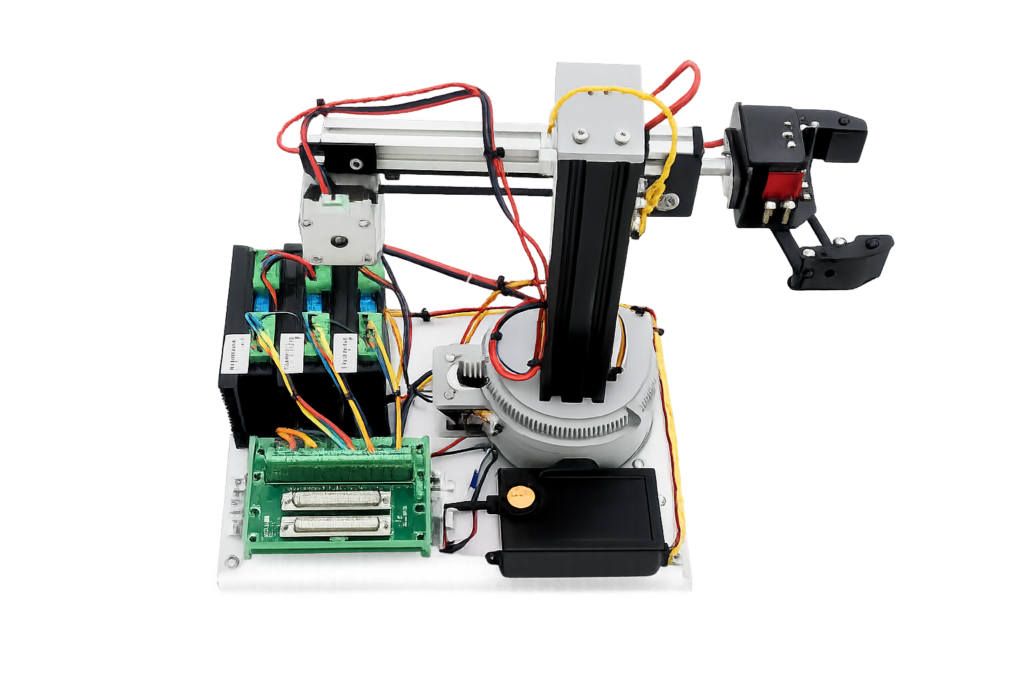
ในชุดประกอบด้วย
- 1pcs x 3-Axis Robot Arm 3D Print
- 3pcs x Stepping Motor Nema17
- 3pcs x DMST08 ไดรเวอร์ สเต็ปเปอร์มอเตอร์ Driver Stepper Motor DC20-50V/4.2A DM542
- 1pcs x GPAF03 กริปเปอร์ไฟฟ้า มือจับหุ่นยนต์ Robot Finger Gripper Model C
- 1set x GPCU02 Gripper Control Box PLC Servo Gripper Control Converter 02
- 1pcs x MT0601 เซอร์โวมอเตอร์ แรงบิดสูง Digital High Torque RC Servo Motor 20kg 180D TD-8120MG
- 1pcs x BDC301 บอร์ด Connector Adaptor Module DB37 Male/Female to Screw Terminal Pitch 5mm Dinrial
- 1pcs x Aluminum Profile 2020T-18cm
- 1pcs x Aluminum Profile 2040T-25cm
- 1pcs x แผ่นฐานพลาสวูด
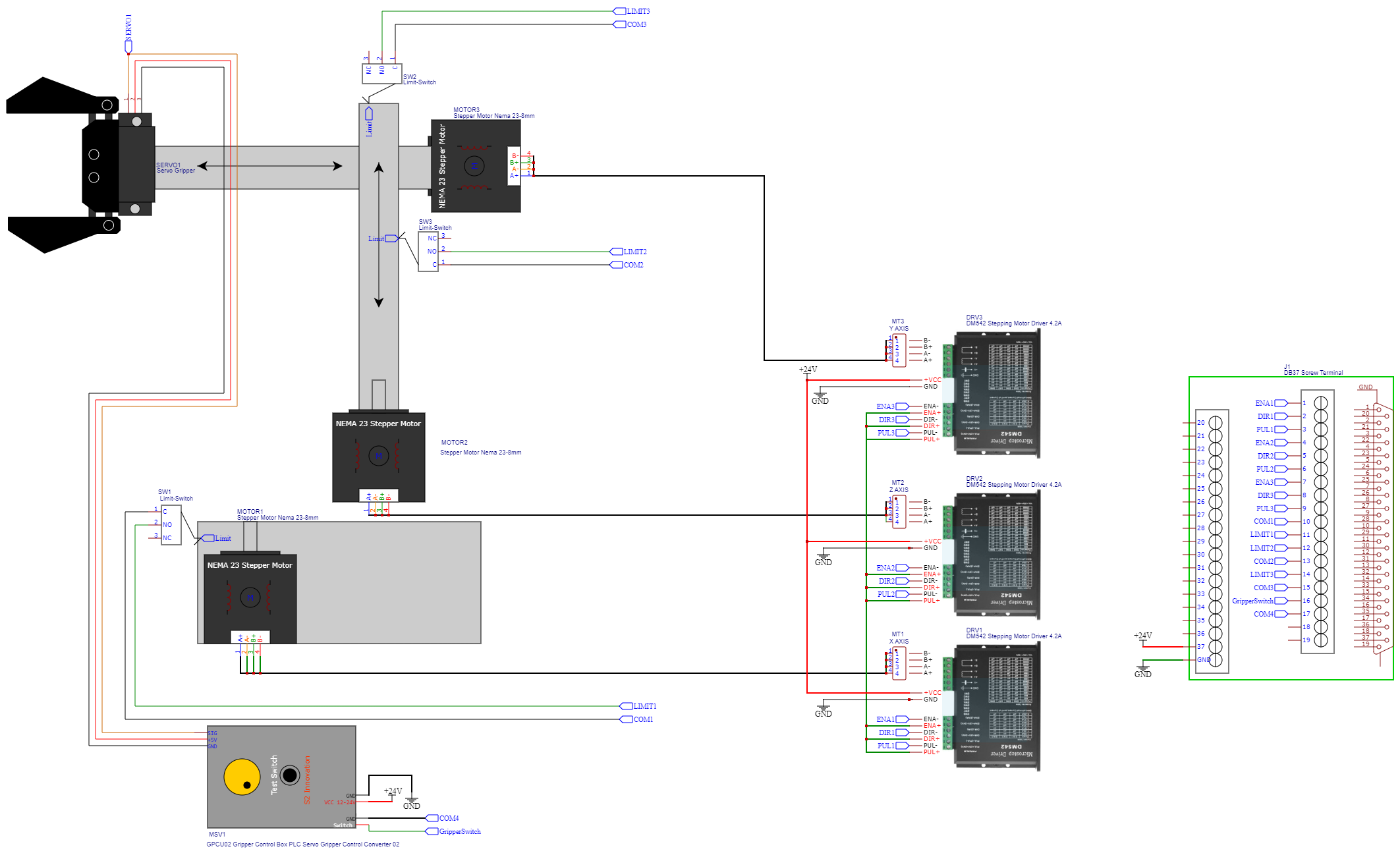
Wiring Diagram
ตัวอย่าง Ladder การควบคุมแขนกลโดยใช้ PLC

รีวิว
ยังไม่มีบทวิจารณ์