คำอธิบาย
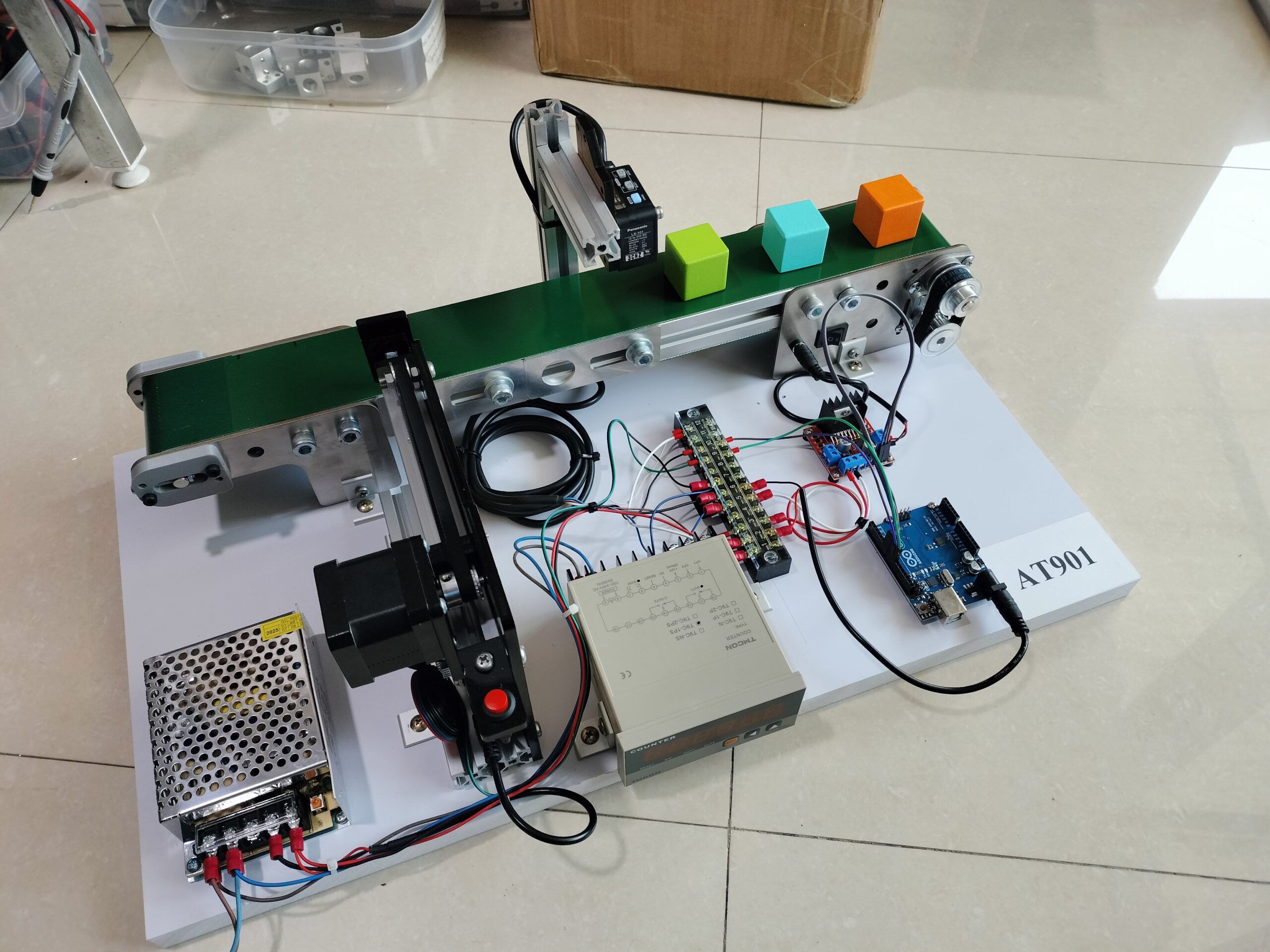
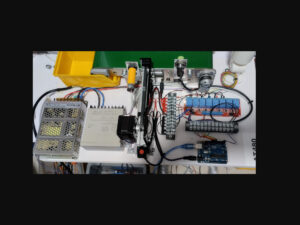
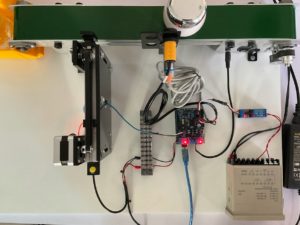
ชุดทดลองตรวจจับวัตถุสีบนสายพานลำเลียง Automation Conveyor + Color Sensor + Counter
ระบบอัตโนมัติ หรือ Automation ประกอบด้วย Hardware และ Software ที่ทำงานร่วมกัน ให้สามารถควบคุมการทำงาน ของระบบเป็นไปแบบอัตโนมัติ ระบบอัตโนมัติ นั้นจะเกี่ยวข้องกับ ระบบควบคุม Control System รวมถึงวิศวกรรมแมคคาทรอนิกส์และหุ่นยนต์พื้นฐานของระบบอัตโนมัติประกอบด้วยส่วนหลักๆคือ
- อินพุทจากเซนเซอร์ต่างๆ เซ็นเซอร์วัดความดัน Pressure sensor, เซ็นเซอร์อุลตราโซนิค Ultrasonic sensor , เซ็นเซอร์ความชื้น Humidity sensor, เซ็นเซอร์วัดก๊าซ Gas sensor, เซ็นเซอร์ตรวจจับการเคลื่อนไหวแบบพีไออาร์ PIR motion sensor, เซ็นเซอร์วัดความเร่ง Acceleration sensor, เซ็นเซอร์วัดแรง Force sensor, เซ็นเซอร์สี color sensor, เซ็นเซอร์เซ็นเซอร์วัดมุมและการหมุน gyro sensor, เซ็นเซอร์อัลตราโซนิก ultrasonic sensor และอื่นๆเช่น เทอร์โมไพล์
- การสื่อสาร – สายเคเบิล USB, RS485, Wi-Fi และอื่นๆ
- ตัวควบคุม เช่น PLC, MCU และอื่นๆ
- เอาท์พุท – เช่นวาล์ว, มอเตอร์, หลอดไฟ, ลำโพง และอื่นๆ
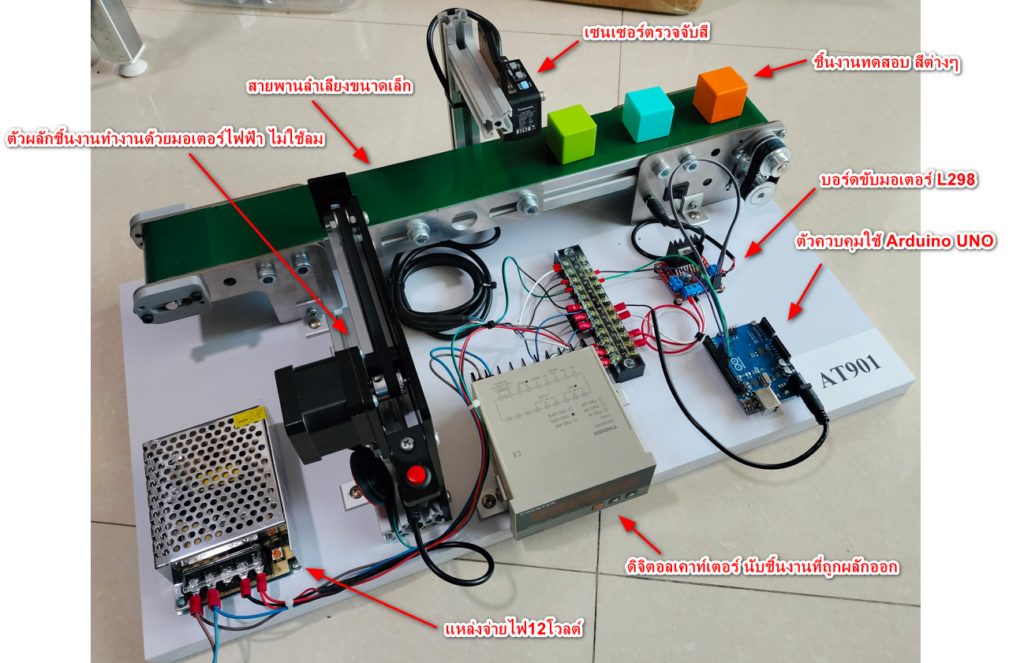
ในชุดประกอบด้วย
- 1set x สายพานลำเลียง CONV-50×06 Conveyor + อะแดปเตอร์จ่ายไฟ
- 10pcs x BKA214 ฉากยึดอลูมิเนียมโปรไฟล์ Aluminum Profile Bracket 2020A-L14
- 1set x เซนเซอร์สีดิจิตอล ใช้สำหรับการตรวจจับวัตถุสี LX-101
- 1set x ชุดขายึด LX-101 Bracket 2020-10cm / 2020-5cm
- 1set x RJ0001 ชุดผลักชิ้นงาน Rejector แบบใช้ Step motor
- 1set x CTPD04 ชุด Counter แสดงผลการนับ 7-Segment
- 4pcs x BXW300 ชิ้นงานทรงลูกบาศก์ ไม้ Wood Cube 3cm
- 1pcs x BDMC03 บอร์ด Arduino Uno Compatible
- 1pcs x BDSP02 บอร์ด L298 Motor Driver Module
- 3pcs x CB0004 ชุดสายไฟแบบหัวเสียบ DC Jack สำหรับต่อมอเตอร์
- 1set x TB1512 จุดเชื่อมต่อสายไฟแบบสกรูเทอร์มินอล Screw Terminal Wiring Cable
- 1pcs x PS1205 Switching Power Supply จ่ายไฟ DC 12 โวลท์
- 1pcs x CBA104 สายไฟเอซีปอกปลายสาย AC Power Cable 2×0.75-L1.5M Black
- 1pcs x แผ่นพลาสวูด 20mm Plastwood-20mm-30x55mm
ใบงาน การใช้ Color sensors เพื่อการคัดแยกชิ้นงานตามสีที่กำหนด
เซ็นเซอร์สี DIGITAL COLOR MARK SENSOR LX-101 Digital Color Sensor เซ็นเซอร์สีแบบดิจิตอล ใช้สำหรับการตรวจจับวัตถุสี มีแหล่งกำเนิดแสง สีแดง สีเขียว สีฟ้า
ระยะการรับสัญญาณ 10 มม
- สายสีน้ำตาล 12-24V
- สายสีน้ำเงิน GND
- สายสีดำ DIGITAL OUTPUT / NPN normally open (Active Low) ต่อ DIGITAL OUTPUT เข้ากับขา Analog ของ Arduino Uno
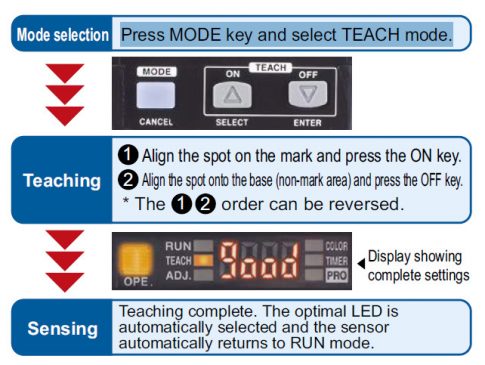
การโปรแกรมให้เซนเซอร์สีจำค่าสีที่เราต้องการ
LX 101 Color Mode Setup การโปรแกรม TECH ให้เซนเซอร์สีจำค่าสีที่ต้องการ
-
- วางชิ้นงานสี ไว้ใต้เซนเซอร์
- กด Mode ไปเรื่อยๆ ให้ไฟสีส้มตำแหน่ง COLOR ติด
- กด ปุ่มลูกศร ขึ้น (หรือปุ่ม ON/SELECT) หรือปุ่มลูกศร ลง (หรือปุ่ม OFF/ENTER) จนหน้าจอแสดงคำว่า CLor
- กด Mode กลับมาที่ RUN หน้าจอจะแสดงคำว่า c 0
- กด Mode ไปที่ TECH ให้ไฟ สีส้มตำแหน่ง TECH ติด หน้าจอจะแสดงคำว่า 1.5t
- วางชิ้นงานไว้ใต้เซนเซอร์ ขยับเซนเซอร์ขั้นลงเพื่อส่องลำแสง LED ที่เซนเซอร์ไปยังชิ้นงาน
- จากนั้น ปุ่มลูกศร ขึ้น (หรือปุ่ม ON/SELECT) คำว่า 1.5t จะกระพริบ และเปลี่ยนเป็นคำว่า good
- เมื่อจอขึ้นคำว่า good แล้ว เซนเซอร์ จะเข้าสู่โหมด RUN ให้เองโดยอัตโนมัติ เป็นอันเสร็จการตั้งการจำค่าสีที่ต้องการ
- เซนเซอร์พร้อมใช้งาน เมื่อเซนเซอร์พบสีที่เรา TECH ไว้ ไฟ OPE สีส้มจะติด พร้อมกับ DIGITAL OUTPUT / NPN จะ Active Low
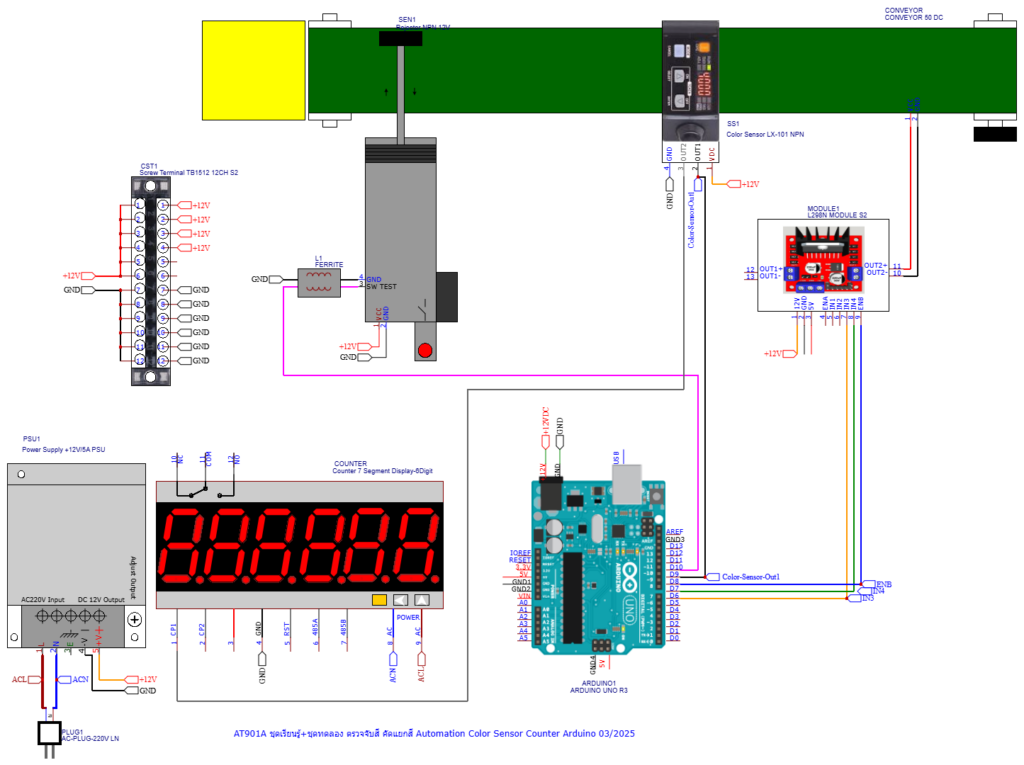
Wiring Automation Color Sensor AT901A
โค้ด Arduino
ตัวอย่างโปรแกรมด้านล่างแสดง การตรวจจับชิ้นงานที่มีสีต่างกัน และตรวจสอบว่าใช่สีที่เราต้องการหรือไม่ เมื่อเซนเซอร์เจอสีที่เราโปรแกรมไว้ ระบบจะรอเวลาที่เราตั้งค่าเพื่อรอให้ชิ้นงานวิ่งไปใกล้ Rejector และผลักออก พร้อมกับส่งสัญญาณไปยังตัวดิจิตอลเคาท์เตอร์
#define in3 6 //ขาควบคุม L298
#define in4 7 //ขาควบคุม L298
#define enB 8 //ขาควบคุม L298
int Sensor_1 = 9; //Digital input Collor Sensor
int Rejector = 10; //Uno Digital for Rejector
int SensorValue_A = 0;
int rotDirection = 0; //ตัวแปรกำหนดทิศทางการหมุนสายพาน
int delay_injector= 5500; //หน่วงเวลาหลังจากเจอชิ้นงาน ค่อยผลัก
void setup()
{
pinMode(enB, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(Sensor_1, INPUT_PULLUP);//Collor SensorCollor Sensor //configure Sensor_1 (pin 9) as an input and enable the internal pull-up resistor
pinMode(Rejector, OUTPUT);//Rejector
digitalWrite(Rejector, HIGH);
// Set initial rotation direction
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
void loop()
{
//***************************************************************************************************
int pwmOutput = 255; //set speed conveyor
analogWrite(enB, pwmOutput); // ส่งสัญญาณ PWM 0-255 = 0-100% เพื่อควบคุมความเร็วสายพาน
rotDirection = 1; // 0 = สายพานเคลื่อนไปทางซ้าย 1=สายพานเคลื่อนไปทางขวา
if (rotDirection == 0) // สายพานเคลื่อนไปทางซ้าย
{
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
if (rotDirection == 1) // สายพานเคลื่อนไปทางขวา
{
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
//**************************************************************************************************
SensorValue_A = digitalRead(Sensor_1);
if(SensorValue_A == LOW) // sensor_A เจอชิ้นงาน
{
delay(delay_injector); // รอเวลาให้ชิ้นงานวิ่งไปใกล้ Rejector สามารถเปลี่ยนแปลงค่าให้เหมาะสมกับความเร็วสายพาน
digitalWrite(Rejector, LOW);// ส่ง Logic 0 เพื่อให้ Rejector ทำงาน เปรียบเสมือน การ กดสวิตช์
delay(500); //หน่วงเวลาขาลง นาน 100 มิลลิเซค
digitalWrite(Rejector, HIGH);
}
}


รีวิว
ยังไม่มีบทวิจารณ์