
AT100 ชุดเรียนรู้+ชุดทดลอง นับชิ้นงานบนสายพานลำเลียง Automation+Counter+TowerLight
฿12,900.00
สินค้าหมดแล้ว
คำอธิบาย
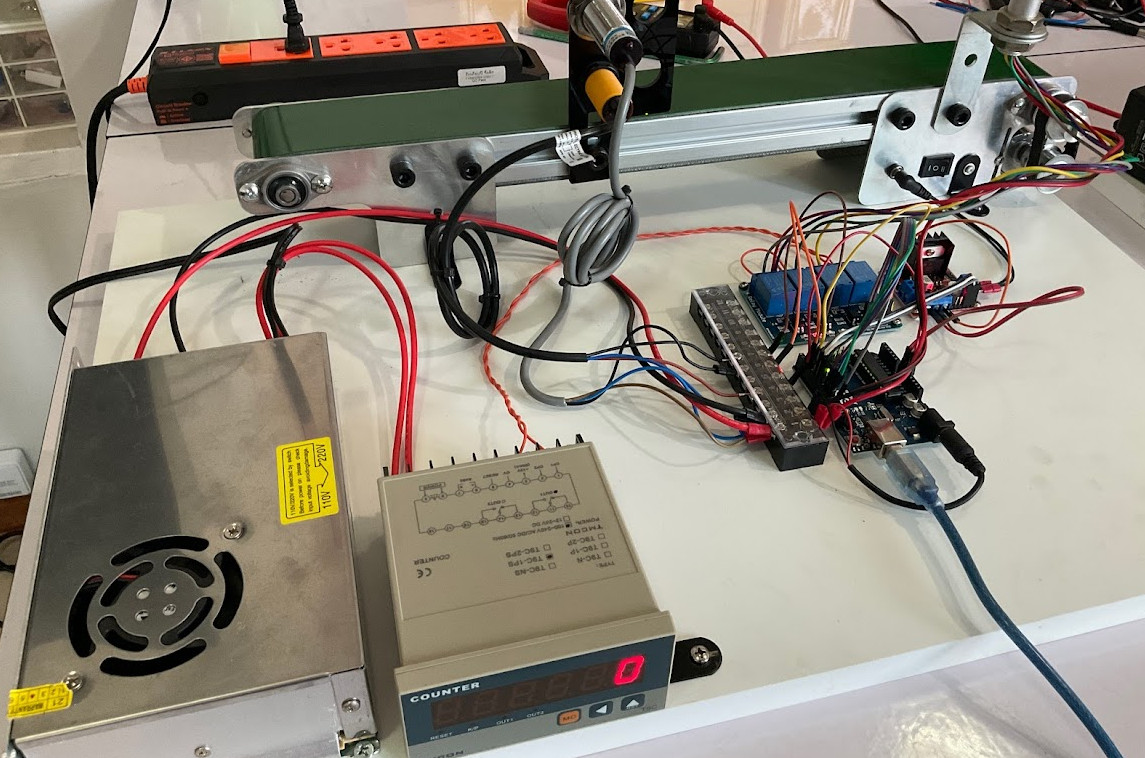
การทดลอง ชุดเรียนรู้+ชุดทดลอง ตรวจจับและนับชิ้นงาน Mini Automation Conveyor Counter+Lamp
- การทดลองเรียนรู้การเขียนโปรแกรมควบคุมสายพานลำเลียงทำงานแบบอัตโนมัติ
- สามารถเปลี่ยน เซนเซอร์ และวายริ่งสาย เพื่อสร้างระบบอัตโนมัติของตัวเอง เช่น Inductive Proximity Sensor เพื่อการตรวจจับโลหะ, Color Sensor เพื่อการคัดแยกสี
ในชุดประกอบด้วย
- 1pcs x สายพานลำเลียง Mini Conveyor
- 1pcs x บอร์ด Arduino
- 1pcs x เคาเตอร์นับชิ้นงาน
- 1pcs x พร็อกซิมิตี้เซนเซอร์แบบ Inductive
- 1pcs x พร็อกซิมิตี้เซนเซอร์แบบ Photoelectric
- 1pcs x ไฟแสดงผล Tower Lamp LED พร้อมบัซเซอร์
- 1pcs x บอร์ดขับมอเตอร์ DC-L298
- 1pcs x บอร์ดรีเลย์โมดูล 4ช่อง Low Logic
- 1pcs x แหล่งจ่ายไฟ 12VDC
Wiring Diagram
https://oshwlab.com/s2insupply/at101-automation
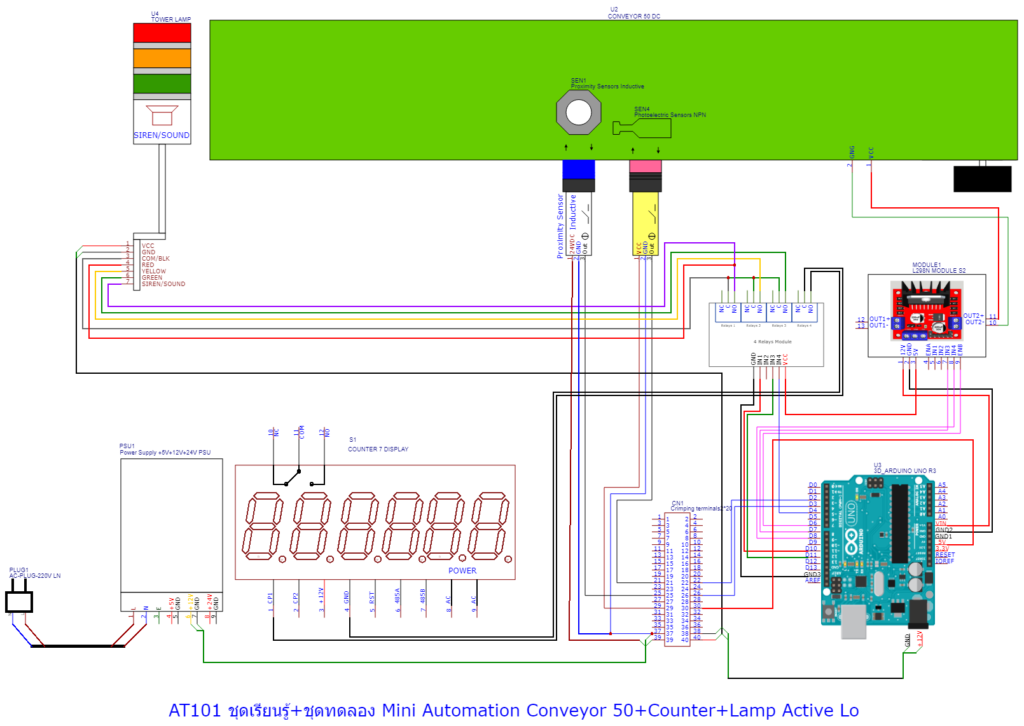
โค้ด Arduino * ใช้สำหรับ Relay Module แบบ Active Low
พื้นฐานระบบอัตโนมัติ
ระบบอัตโนมัติ หรือ Automation ประกอบด้วย Hardware และ Software ที่ทำงานร่วมกัน ให้สามารถควบคุมการทำงาน ของระบบเป็นไปแบบอัตโนมัติ ระบบอัตโนมัติ นั้นจะเกี่ยวข้องกับ ระบบควบคุม Control System รวมถึงวิศวกรรมแมคคาทรอนิกส์และหุ่นยนต์พื้นฐานของระบบอัตโนมัติประกอบด้วยส่วนหลักๆคือ
- อินพุทจากเซนเซอร์ต่างๆ เซ็นเซอร์วัดความดัน Pressure sensor, เซ็นเซอร์อุลตราโซนิค Ultrasonic sensor , เซ็นเซอร์ความชื้น Humidity sensor, เซ็นเซอร์วัดก๊าซ Gas sensor, เซ็นเซอร์ตรวจจับการเคลื่อนไหวแบบพีไออาร์ PIR motion sensor, เซ็นเซอร์วัดความเร่ง Acceleration sensor, เซ็นเซอร์วัดแรง Force sensor, เซ็นเซอร์สี color sensor, เซ็นเซอร์เซ็นเซอร์วัดมุมและการหมุน gyro sensor, เซ็นเซอร์อัลตราโซนิก ultrasonic sensor และอื่นๆเช่น เทอร์โมไพล์
- การสื่อสาร – สายเคเบิล USB, RS485, Wi-Fi และอื่นๆ
- ตัวควบคุม เช่น MCU และอื่นๆ
- เอาท์พุท – เช่นวาล์ว, มอเตอร์, หลอดไฟ, ลำโพง และอื่นๆ
สินค้าที่เกี่ยวข้อง
-
นับชิ้นงานบนสายพานลำเลียง Conveyor Counter RS485 Sensor
฿18,900.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า -

CTP202 เครื่องนับจำนวน Digital Counter 4 Digitx2 Preset 7SG Remote RS485
฿8,670.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า -
AT302B ชุดเรียนรู้+ชุดทดลอง ตรวจจับของเหลว Automation Capacitive Proximity Sensor+Counter
฿12,900.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า
รีวิว
ยังไม่มีบทวิจารณ์