
คำอธิบาย
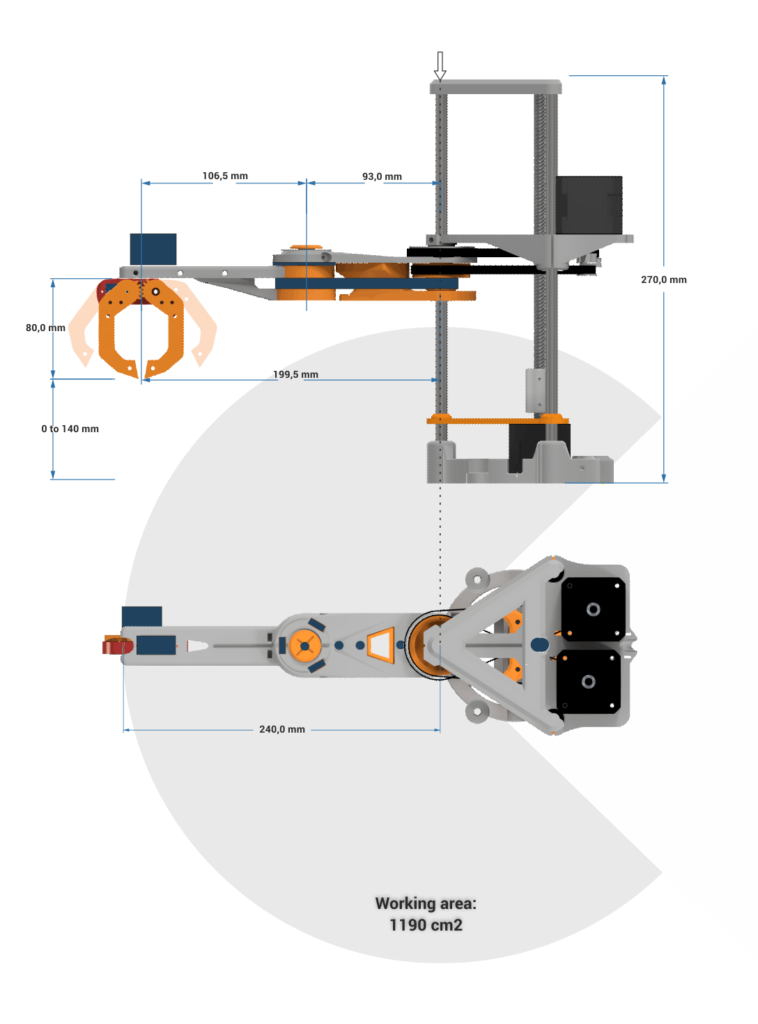
แขนหุ่นยนต์สการ่า Arduino Scara Robot Arm หุ่นยนต์ SCARA (Selective Compliance Assembly Robot Arm)จะมีลักษณะ แกนที่ 1 เอว และ แกนที่ 2 ข้อศอก เป็นแบบหมุนรอบแกนแนวตั้ง
แกนที่ 3 เป็นมือจับ จะเป็นลักษณะการเคลื่อนที่ขึ้นลงแบบเชิงเส้น (Prismatic) หุ่นยนต์ SCARA จะเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นยำสูง
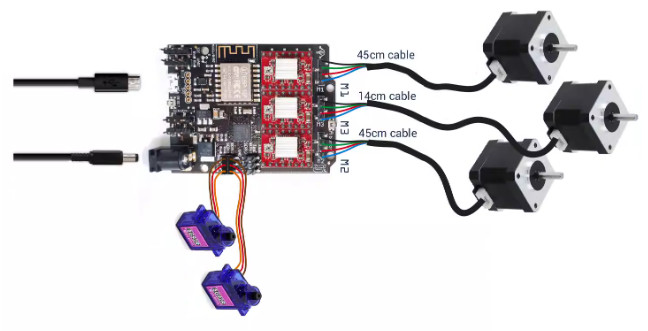
- บอร์ดควบคุม WIFI ชิป ESP32
- สเต็ปเปอร์มอเตอร์ Nema17 42 + Driver A4988
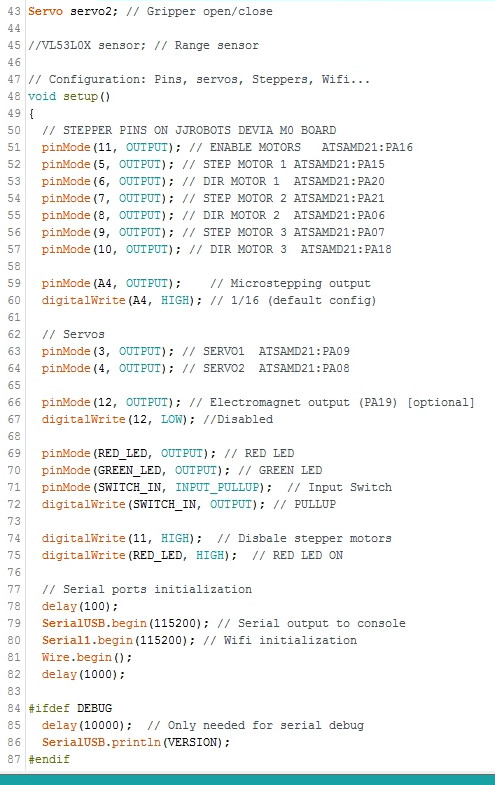
- การเขียนโปรแกรม Arduino, สามารถควบคุมหุ่นยนต์ผ่าน WIFI / USB
- ซอร์สโค้ดของแขนหุ่นยนต์ Arduino
- ซอร์สโค้ดของแขนหุ่นยนต์ Blocky
- แผนภาพวงจร, บทช่วยการสอน
- PC Software
Controller
Arduino Open Code
Dimension


รีวิว
ยังไม่มีบทวิจารณ์