
คำอธิบาย
เซนเซอร์วัดตำแหน่งมุมความแม่นยำสูงหมุนรอบตัว Angle Position Sensor Hall Non-contact
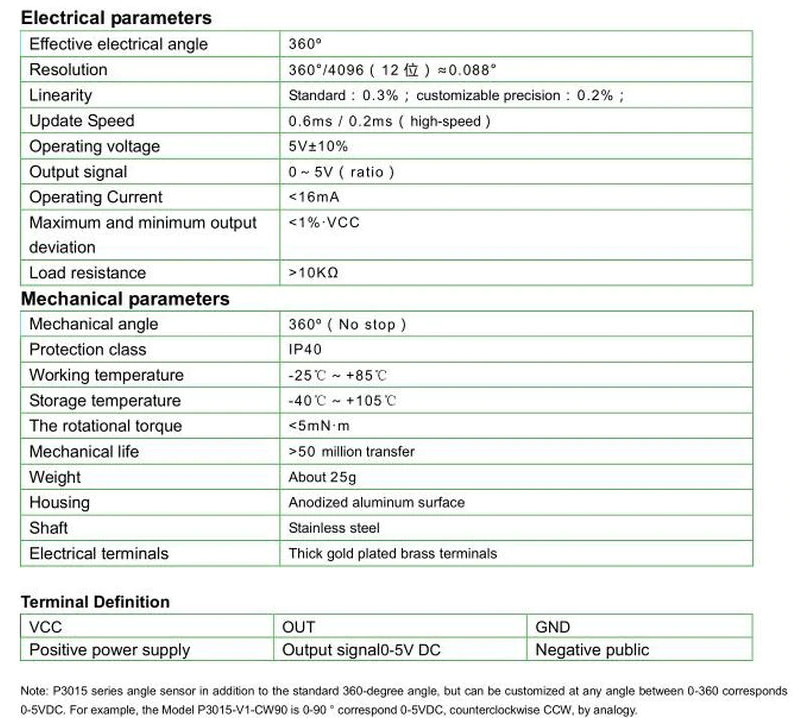
พารามิเตอร์ทางไฟฟ้า
- แรงดันไฟฟ้า DC5V
- สัญญาณเอาต์พุต DC0-5V
- ความละเอียด 360° / 4096 (12 บิต) ≈ 0.088°
- Linearity Standard 0.3%
- ความแม่นยำสูง 0.15%
- ความเร็ว 0.6ms/0.2ms (ความเร็วสูง)
- ความต้านทานโหลด > 10KΩ
- Effective electrical angle 360 degrees hall angle sensor
พารามิเตอร์ทางกล
- มุมกลหมุนรอบ 360º
- ระดับการป้องกัน IP40
- แรงบิดในการหมุน < 5 mNm
- อายุการใช้งาน > 10 ล้านครั้ง
- น้ำหนัก 25g
- ผิวอลูมิเนียม
- Shaft สแตนเลส
- ขั้วไฟฟ้า ทองเหลืองชุบทอง
Code
https://docs.arduino.cc/built-in-examples/basics/ReadAnalogVoltage
analogRead() [Analog I/O]
อ่านค่าจากขาอะนาล็อกที่ระบุ บอร์ด Arduino มีตัวแปลงแอนะล็อกเป็นดิจิทัลแบบหลายช่องสัญญาณ 10 บิต ซึ่งหมายความว่าจะแมปแรงดันอินพุตระหว่าง 0 และแรงดันใช้งาน (5V หรือ 3.3V) เป็นค่าจำนวนเต็มระหว่าง 0 ถึง 1023 ตัวอย่างเช่น บน Arduino UNO ค่านี้จะให้ความละเอียดระหว่างการอ่าน: 5 โวลต์ / 1024 หน่วย หรือ , 0.0049 โวลต์ (4.9 มิลลิโวลต์) ต่อหน่วย ดูตารางด้านล่างสำหรับพินที่ใช้งาน แรงดันไฟฟ้า และความละเอียดสูงสุดสำหรับบอร์ด Arduino บางรุ่น
ช่วงอินพุตสามารถเปลี่ยนได้โดยใช้ analogReference() ในขณะที่สามารถเปลี่ยนความละเอียดได้ (สำหรับบอร์ด Zero, Due และ MKR เท่านั้น) โดยใช้ analogReadResolution()
บนบอร์ดที่ใช้ ATmega (UNO, Nano, Mini, Mega) จะใช้เวลาประมาณ 100 ไมโครวินาที (0.0001 วินาที) ในการอ่านอินพุตแบบอะนาล็อก ดังนั้นอัตราการอ่านสูงสุดจึงอยู่ที่ประมาณ 10,000 ครั้งต่อวินาที
ในโปรแกรมด้านล่าง สิ่งแรกที่คุณจะทำคือในฟังก์ชันการตั้งค่า เพื่อเริ่มการสื่อสารแบบอนุกรมที่ข้อมูล 9600 บิตต่อวินาที ระหว่างบอร์ดและคอมพิวเตอร์ของคุณด้วยสาย:
Serial.begin(9600);
ถัดไป ในลูปหลักของโค้ด คุณต้องสร้างตัวแปรเพื่อเก็บค่าความต้านทาน (ซึ่งจะอยู่ระหว่าง 0 ถึง 1023 เหมาะสำหรับประเภทข้อมูล int) ที่มาจากโพเทนชิออมิเตอร์ของคุณ:
int sensorValue = analogRead(A0);
หากต้องการเปลี่ยนค่าจาก 0-1023 เป็นช่วงที่สอดคล้องกับแรงดันไฟฟ้าที่พินกำลังอ่าน คุณจะต้องสร้างตัวแปรอื่น ลอยตัว และคำนวณเลขเล็กน้อย หากต้องการปรับขนาดตัวเลขระหว่าง 0.0 ถึง 5.0 ให้หาร 5.0 ด้วย 1023.0 แล้วคูณด้วย sensorValue :
float voltage= sensorValue * (5.0 / 1023.0);
สุดท้าย คุณต้องพิมพ์ข้อมูลนี้ไปยังจอภาพอนุกรมของคุณ คุณสามารถทำได้โดยใช้คำสั่ง Serial.println() ในโค้ดบรรทัดสุดท้ายของคุณ:
Serial.println(voltage)
ตอนนี้ เมื่อคุณเปิด Serial Monitor ของคุณใน Arduino IDE (โดยคลิกที่ไอคอนทางด้านขวาของแถบสีเขียวด้านบน หรือกด Ctrl+Shift+M) คุณควรเห็นตัวเลขต่อเนื่องตั้งแต่ 0.0 – 5.0 เมื่อคุณหมุนหม้อ ค่าต่างๆ จะเปลี่ยนตามแรงดันไฟที่เข้าขา A0



รีวิว
ยังไม่มีบทวิจารณ์