ตัวอย่างการควบคุม สเต็ปปิ้งมอเตอร์ขนาด 3 แอมป์ ด้วย Arduino + ไมโคร Step Driver TB6600 เบื้องต้น
Linear_Slide_LSSX05_TB6600
https://drive.google.com/drive/folders/1YALYYlV6PUrQz-IYNR843RhyF7twXqQ4?usp=sharing
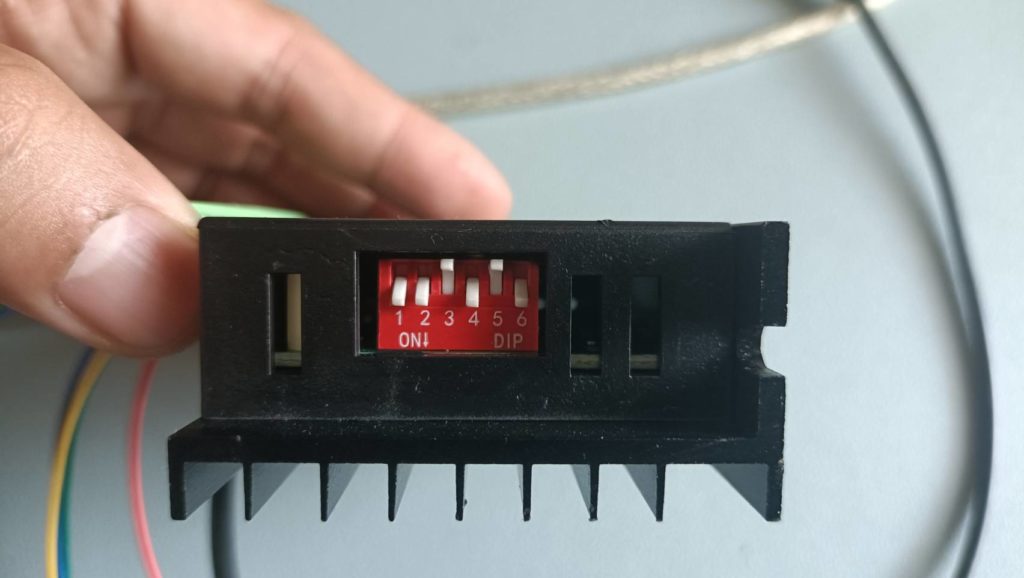
สเต็ปปิ้งมอเตอร์ขนาด 3 แอมป์ ปรับตั้ง ดิฟต์สวิตช์ของไมโคร Step Driver TB6600 ดังนี้
- DIP Switch S1 S2 S3 ตั้งเป็น ON OFF ON 400 P/R 2/A
- DIP Switch S4 S5 S6 ตั้งเป็น ON OFF OFF 2.0A
ตัวอย่างการควบคุม สเต็ปปิ้งมอเตอร์ขนาด 3 แอมป์ ด้วย Arduino + ไมโคร Step Driver TB6600 เบื้องต้น
ตัวอย่างโปรแกรมควบคุมรางสไลด์ แบบไป-กลับ ตามตำแหน่งที่กำหนด
ซอร์สโค้ดเพื่อควบคุมการทำงาน ได้ตามวีดิโอด้านบน
#include <AccelStepper.h>
//12V full step 200 pulse/rev, 1.5A
// S1 S2 S3 S4 S5 S6
// NO NO OFF NO OFF NO
// The X Stepper pins
#define STEPPER1_DIR_PIN 3
#define STEPPER1_STEP_PIN 2
AccelStepper stepper1(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN);
int MaxAcc = 10000;
int MaxSpd = 800;
int State = 0;
int Step = 0;
void setup()
{
stepper1.setMaxSpeed(MaxSpd);
stepper1.setAcceleration(MaxAcc);
stepper1.setCurrentPosition(0);
stepper1.moveTo(1000);
Serial.begin(9600);
delay(2000);
Serial.println("Power ON ");
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(2000);
}
void loop()
{
//Serial.println(stepper1.currentPosition());
switch (State)
{
case 0: //
if (stepper1.distanceToGo() == 0)
{
State =1;
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(1000);
stepper1.moveTo(0);
}
break;
case 1: // your hand is close to the sensor
if (stepper1.distanceToGo() == 0)
{
State = 2;
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(1000);
stepper1.moveTo(2500);
}
break;
case 2: // your hand is a few inches from the sensor
if (stepper1.distanceToGo() == 0)
{
State=3;
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(1000);
stepper1.moveTo(0);
}
break;
case 3: // your hand is nowhere near the sensor
if (stepper1.distanceToGo() == 0)
{
State = 4;
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(1000);
stepper1.moveTo(-1000);
}
break;
case 4: // your hand is nowhere near the sensor
if (stepper1.distanceToGo() == 0)
{
State = 5;
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(1000);
stepper1.moveTo(0);
}
break;
case 5: // your hand is nowhere near the sensor
if (stepper1.distanceToGo() == 0)
{
State = 0;
Serial.print("State = ");
Serial.print(State);
Serial.print("t position = ");
Serial.println(stepper1.currentPosition());
delay(1000);
stepper1.moveTo(-2000);
}
break;
}
stepper1.run();
}
เอาต์พุตแสดงตำแหน่ง ที่เคลื่อนที่ไป โดยจะทำงานวนไปตั้งแต่ stateที่ 0 ถึง state 5

การต่อสายสัญญาณ ระหว่างบอร์ดอาดูโน่ และ ไดร์ฟเวอร์ สเต็ปเปอร์มอเตอร์

การตั้งค่าตัวไดร์ฟเวอร์ ขับสเต็ปเปอร์ ความละเอียด 200 สเต็ปต่อรอบ ตั้งค่ากระแส1.0 แอมป์
ตัวอย่างการสั่งงานด้วย Arduino Code
- กระแสที่ 3 แอมป์
- Micro Step = 4, PPR = 800
ตัวอย่างการสั่งงานด้วย Arduino Code สำหรับทดสอบการทำงานเบื้องต้น
- กระแสที่ 3 แอมป์
- Micro Step = 4, PPR = 800
Linear_Slide_LSSX05_TB6600
#include <AccelStepper.h>
// The X Stepper pins
#define PUL_PIN 2 // PUL_PIN
#define DIR_PIN 3 // DIR_PIN
AccelStepper stepper(AccelStepper::DRIVER, PUL_PIN, DIR_PIN);
void setup(){
stepper.setMaxSpeed(10000.0); // ปรับความเร็ว
stepper.setAcceleration(10000.0); // ปรับความเร่ง
}
void loop(){
stepper.runToNewPosition(0);
delay(500);
stepper.runToNewPosition(10000); // ระยะการเคลื่อนที่ไป
delay(500);
stepper.runToNewPosition(0);
delay(500);
stepper.runToNewPosition(-10000); // ระยะการเคลื่อนที่กลับ
delay(500);
}
ตัวอย่างการสั่งงานด้วย Arduino Code แบบมี Home Limit Switch
#include <AccelStepper.h>
// The X Stepper pins
#define STEPPER1_DIR_PIN 3
#define STEPPER1_STEP_PIN 2
AccelStepper stepper(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN);
const int buttonPin = 7; //home switch
int state = 0;
int buttonState = 0;
int MaxAcc = 6000;
int MaxSpd = 4000;
void setup()
{
Serial.begin(9600);
pinMode(buttonPin, INPUT_PULLUP);
stepper.setMaxSpeed(MaxSpd); // ทดลองปรับความเร็ว
stepper.setAcceleration(MaxAcc); // ทดลองปรับความเร่ง
}
void loop()
{
//Serial.println(state);
buttonState = digitalRead(buttonPin);
if((buttonState == HIGH)&&(state == 0))//
{
stepper.setMaxSpeed(MaxSpd); // หมุนช้าเข้าหาสวิตช์ Home
stepper.setAcceleration(MaxAcc);
stepper.setSpeed(-500);
stepper.runSpeed();
}
else if ((buttonState == LOW) &&(state == 0))
{
stepper.setMaxSpeed(MaxSpd);
stepper.setAcceleration(MaxAcc);
stepper.setCurrentPosition(0);
state = 1;
delay(1000);
}
if(state ==1 )
{
stepper.runToNewPosition(12000);
delay(1000);
stepper.runToNewPosition(0);
delay(1000);
}
}