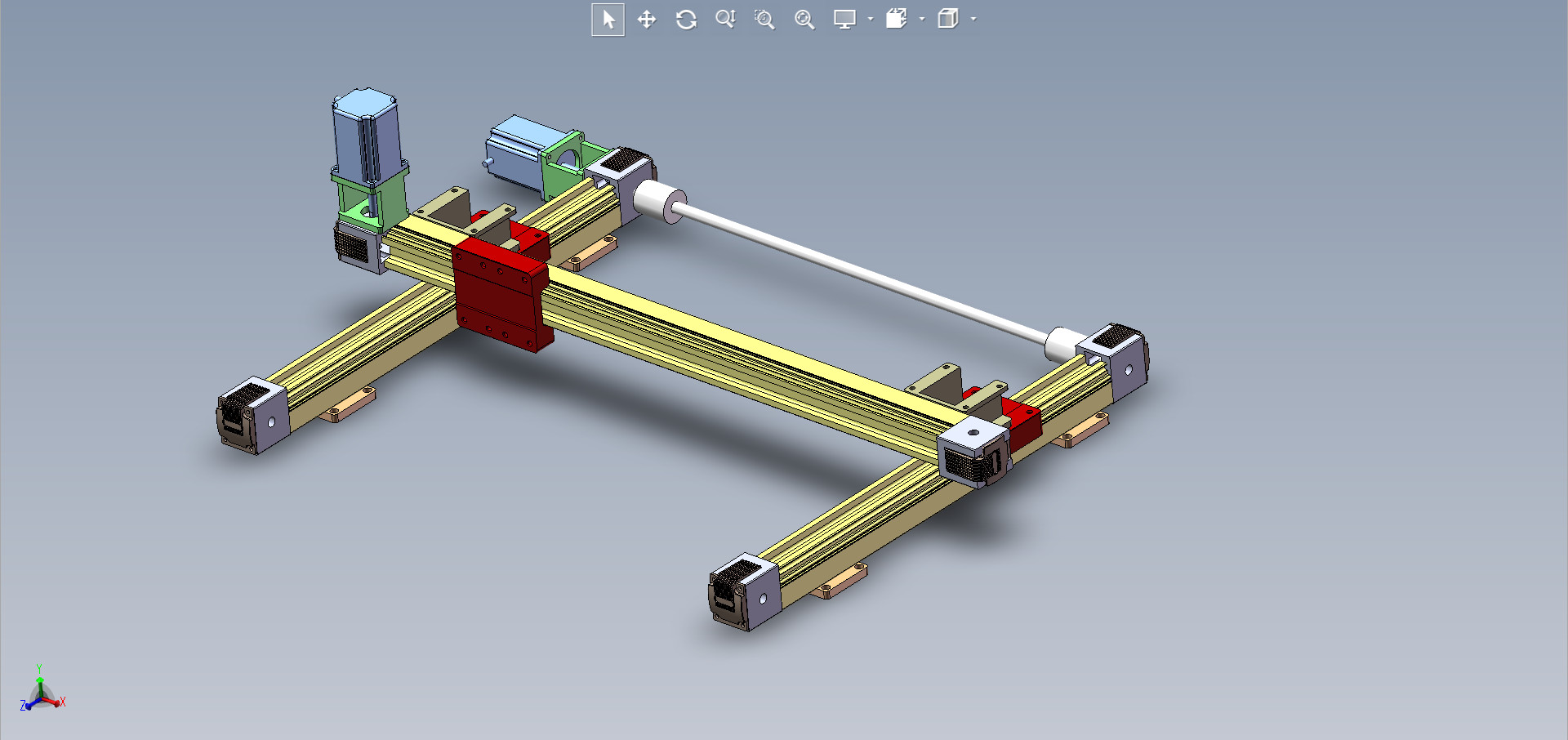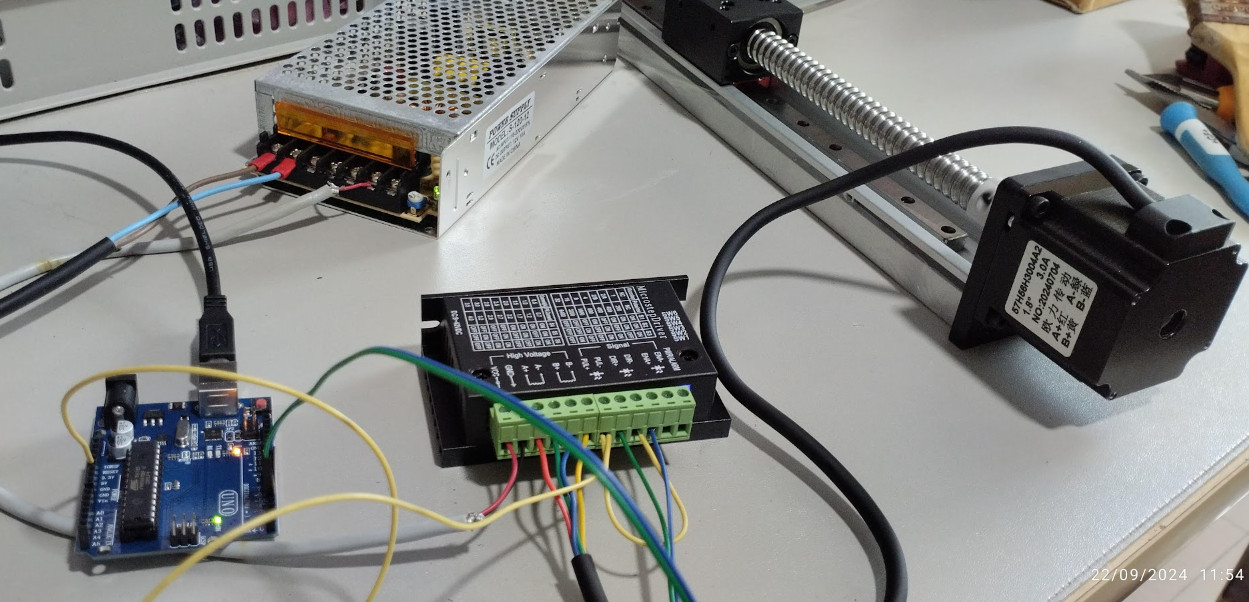
ตัวอย่างการควบคุม สเต็ปปิ้งมอเตอร์ขนาด 3 แอมป์ ด้วย Arduino + ไมโคร Step Driver TB6600 เบื้องต้น
Linear_Slide_LSSX05_TB6600 https://drive.google.com/drive/folders/1YALYYlV6PUrQz-IYNR843RhyF7twXqQ4?usp=sharing
สเต็ปปิ้งมอเตอร์ขนาด 3 แอมป์ ปรับตั้ง ดิฟต์สวิตช์ของไมโคร Step Driver TB6600 ดังนี้
- DIP Switch S1 S2 S3 ตั้งเป็น On Off On
- DIP Switch S4 S5 S6 ตั้งเป็น On Off On
#include <AccelStepper.h>
// The X Stepper pins
#define PUL_PIN 2 // PUL_PIN
#define DIR_PIN 3 // DIR_PIN
AccelStepper stepper(AccelStepper::DRIVER, PUL_PIN, DIR_PIN);
void setup()
{
stepper.setMaxSpeed(3500.0); // ปรับความเร็ว หน่วยเป็น พัลส์ต่อวินาที steps per second
stepper.setAcceleration(5500.0); // ปรับความเร่ง หน่วยเป็น พัลส์ต่อวินาทีกำลังสอง steps per second per second
stepper.setCurrentPosition(0); //เซตค่าตำแหน่งเริ่มเท่ากับ 0 ก่อนเข้าลูป
}
void loop()
{
stepper.runToNewPosition(0); //เริ่มต้นที่ตำแหน่ง 0
delay(500);
stepper.runToNewPosition(1500); // ระยะการเคลื่อนที่ไปทางบวก ด้านขวา จำนวน พัลส์
delay(500);
stepper.runToNewPosition(0);
delay(500);
stepper.runToNewPosition(-1500); // ระยะการเคลื่อนที่กลับ ทางลบ ด้านซ้าย จำนวน พัลส์
delay(500);
}