
คำอธิบาย
หุ่นยนต์เพื่อการศึกษา หุ่นยนต์ แขนกลเพื่อการศึกษา Education Robot Arm DOFBOT
- Virtual machine system development: Control decisions are generated through the PC-side virtual machine, without the need for embedded development boards(Mac not supported)
- ROS Robot Control System: The ROS system simplifies the 6 DOF serial bus servo and supports functions such as forward solution, inverse solution, and motion planning.
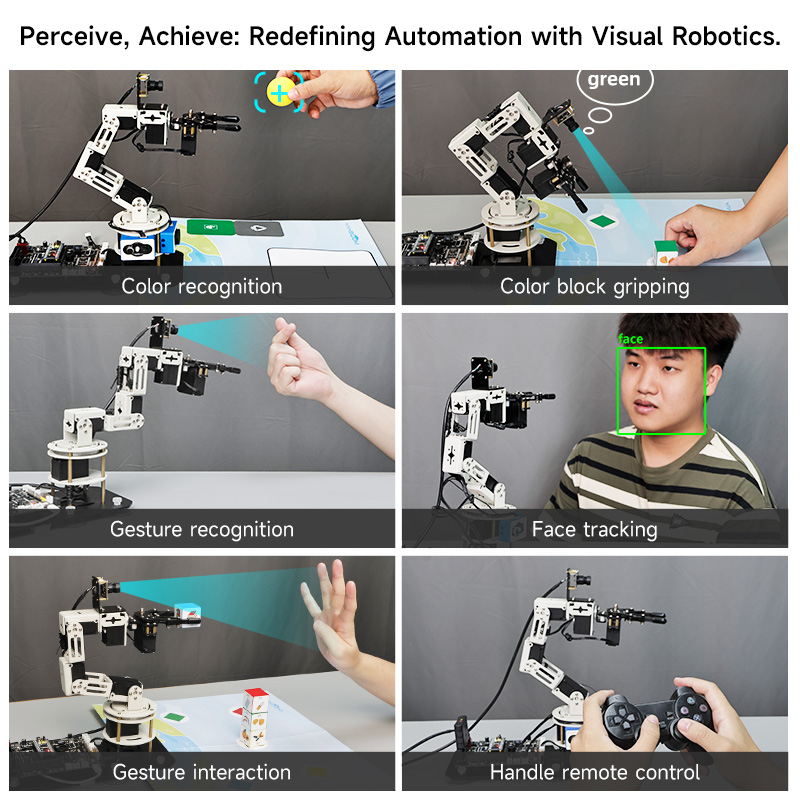
- AI Vision Functions: Provide MoveIt simulation, collision detection, color recognition tracking, item grabbing, gesture recognition, and many other functions.


คุณลักษณะทั่วไป
https://docs.google.com/document/d/1HltshBwKzDOx4hGw25siQnY7HvMm70apMYx11Mtyp_Q/edit?usp=sharing

- Microprocessors Operating system
คุณสมบัติ
- Virtual machine system การพัฒนาระบบเครื่องเสมือน โดยอิงตามการออกแบบระบบเครื่องเสมือน การตัดสินใจควบคุมจะสร้างขึ้นผ่านเครื่องเสมือนฝั่งพีซี โดยไม่ต้องใช้บอร์ดพัฒนาแบบฝัง ทำให้กระบวนการเรียนรู้และการใช้งานง่ายขึ้น (ไม่รองรับ Mac)
- ROS robot control system ระบบควบคุมหุ่นยนต์ ROS ระบบ ROS แบบบูรณาการช่วยลดความซับซ้อนของการควบคุมการเคลื่อนไหวเซอร์โวบัสอนุกรม 6 DOF และรองรับฟังก์ชันต่างๆ เช่น โซลูชันไปข้างหน้า โซลูชันย้อนกลับ และการวางแผนการเคลื่อนไหว
- AI vision functions ฟังก์ชันการมองเห็น AI ให้การจำลอง MoveIt การตรวจจับการชน การติดตามการจดจำสี การคว้าสิ่งของ การจดจำท่าทาง และฟังก์ชันอื่นๆ อีกมากมาย
- Remote control วิธีการควบคุมระยะไกลต่างๆ Yahboom มอบแอปมือถือแบบมัลติฟังก์ชัน ด้ามจับไร้สาย และซอฟต์แวร์พีซี ซึ่งสามารถใช้ควบคุมแขนหุ่นยนต์ได้
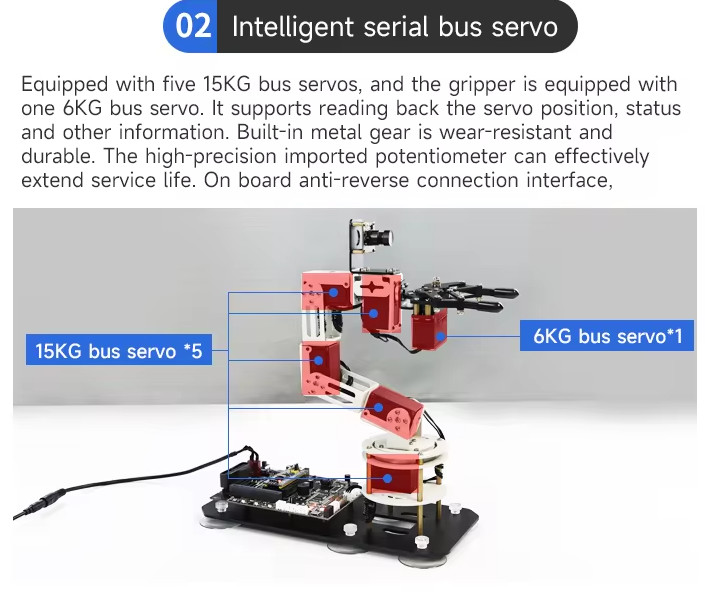
- Professional hardware configuration การกำหนดค่าฮาร์ดแวร์ระดับมืออาชีพ ประกอบด้วยโมดูลกล้อง 30MP บอร์ดขยายแบบมัลติฟังก์ชัน เซอร์โวบัส 515KG + เซอร์โวบัส 16KG และแขนหุ่นยนต์ทั้งหมดทำจากอลูมิเนียมอโนไดซ์สีขาว ซึ่งสวยงามและทนทาน
ในชุดประกอบด้วย Package
- DOFBOT SE Robotic arm (Assembled before shipping)
- STM32 Core board VM (Virtual Machine)
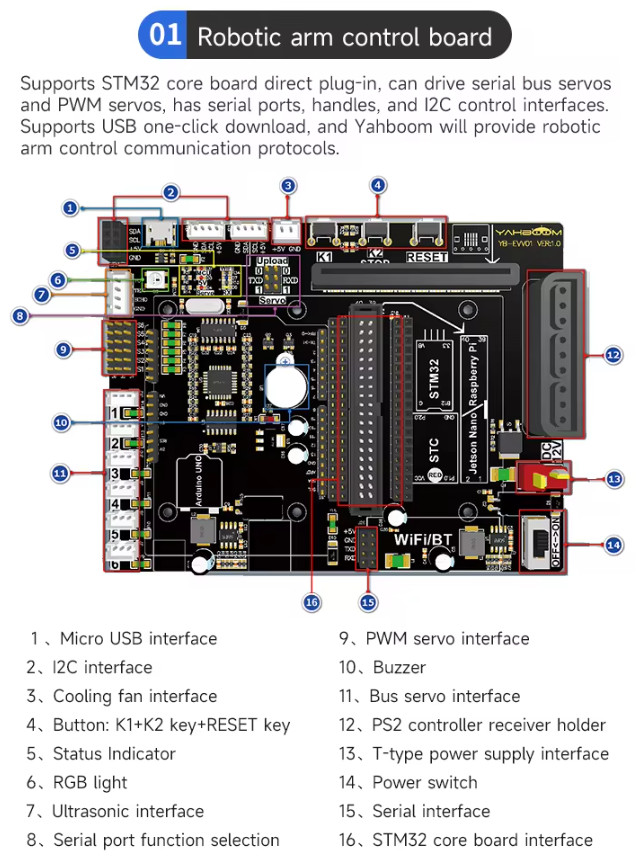
- Robotic Arm Expansion Board
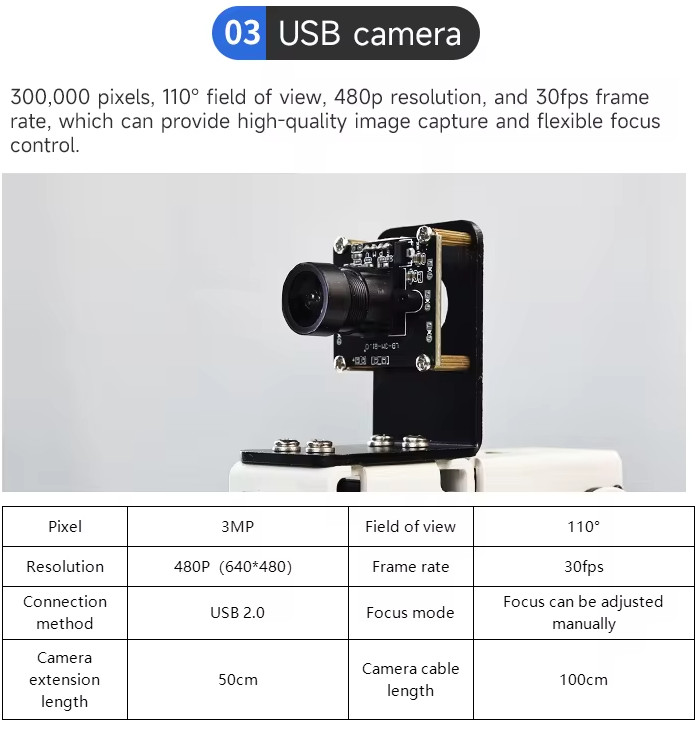
- USB Camera
- 2.4Ghz Wireless Handle
- Camera Fixed bracket
- Camera Cable
- Camera Extension line
- Black Tie x 6
- Suction Cup x 6
- Adapter Cable + Power Adapter
- สายชาร์จ Micro USB Data cable
- Building Blocks x 4
- Robotic Arm Maps 1 2 3 Screwdriver
- Screw and Nut copper pillar parts package x 3 DOFBOT SE
- Packaging Box Manual
*DOFBOT-SE นั้นเป็นแขนหุ่นยนต์ 6DOF ที่พัฒนาโดย Yahboom ใช้ระบบควบคุมที่เป็น VM (Virtual Machine) บนฝั่ง PC และชิ้นส่วนควบคุมเป็นบอร์ด STM32 ภายใน
Online course Tutorial link
- http://www.yahboom.net/
study/DOFBOT_SE - First Trial
- Assemble Servo calibration
- Linux basics course
- Remote control course
- Preparation
- Basic control course
- OpenCV course
- AI vision basic course
- AI vision tracking course
- AI visual catch course
- ROS basic course
- ROS+Opencv course
- Mediapipe course
- Kinesiology Kinimetic course
Download
https://github.com/YahboomTechnology/DOFBOT-SE
- VM File
- Instruction manual
- Hardware_3DModelFile
- PC_Software
- Code
- Communication Protocol-Python Library
DOFBOT-SE คือแขนหุ่นยนต์ 6DOF ที่พัฒนาโดย Yahboom โดยอิงจากระบบเครื่องเสมือน ไม่ต้องใช้บอร์ดพัฒนาแบบฝัง (Jetson NANO/Raspberry Pi) สร้างการตัดสินใจควบคุมผ่านเครื่องเสมือนฝั่งพีซี และควบคุมโดยตัวควบคุม STM32 เพื่อใช้งานฟังก์ชันต่างๆ เราใช้ระบบควบคุมหุ่นยนต์ ROS เพื่อลดความซับซ้อนของการควบคุมการเคลื่อนไหวเซอร์โวบัสอนุกรม 6DOF ทำให้สามารถแก้ปัญหาการเดินหน้าและถอยหลัง การวางแผนการเคลื่อนไหว การจำลอง MoveIt การตรวจจับการชน และฟังก์ชันอื่นๆ ได้ DOFBOT-SE มาพร้อมกล้อง 3MP ผสานกับอัลกอริทึมการมองเห็นของเครื่องจักร ซึ่งไม่เพียงแต่ช่วยให้ติดตามและจับสีได้เท่านั้น แต่ยังมีฟังก์ชันต่างๆ มากมาย เช่น การฝึกโมเดล การคัดแยกขยะ และการจดจำท่าทาง ไม่ว่าคุณจะเป็นมือใหม่หรือผู้พัฒนาที่มีประสบการณ์ DOFBOT-SE ก็เป็นชุดการเรียนรู้หุ่นยนต์ที่คุ้มต้นทุนสำหรับคุณ
ตารางเปรียบเทียบระหว่าง DOFBOT ตัวสีเขียว และ DOFBOT SE ตัวสีขาว
| รายการ | DOFBOT ตัวสีเขียว | DOFBOT SE ตัวสีขาว |
|---|---|---|
| Master Control | Raspberry Pi / Jetson Nano B01 | Virtual Machine |
| Repeatable Accuracy | ±0.5 mm | ±0.5 mm |
| Degree of Freedom | 6 แกน | 6 แกน |
| Arm Span | 350 mm | 350 mm |
| Gripper Open-Close Angle | 6 cm | 6 cm |
| Structure Type | Traditional robotic arm structure | Traditional robotic arm structure |
| Camera | USB HD camera | USB HD camera |
| Visual Dimension | Plane 2D image | Plane 2D image |
| Display | / | / |
| Function | Interconnection control, MoveIt motion planning, Rviz robot simulation, 2D visual interaction |
Interconnection control, MoveIt motion planning, Rviz robot simulation, 2D visual interaction |
| Positioning | Raspberry Pi / Jetson Nano Entry-level visual robotic arm |
Virtual Machine version Entry-level visual robotic arm |
ข้อพิจารณา:
- หากต้องการใช้งาน ภายนอก (Standalone) โดยไม่พึ่งพาเครื่องคอมพิวเตอร์หลักมากนัก → DOFBOT (เพราะใช้ Raspberry Pi หรือ Jetson Nano ควบคุมได้โดยตรง)
- หากต้องการใช้งานผ่าน เครื่องคอมพิวเตอร์หรือ Virtual Machine → DOFBOT SE สีขาว



รีวิว
ยังไม่มีบทวิจารณ์