
คำอธิบาย
บอร์ดขับมอเตอร์บัสเลส BLDC Servo Motor drivers SimpleFOC Mini V1.0 DRV8313
- SimpleFOC library and any BLDC motor Open-Source
- DRV8313 H-bridge drivers based Overcurrent protection, Fault detection Deep-sleep more
- Onboard 3.3V LDO regulator maximum current 10mA
- Power supply 8-35V
- Max current 2.5A
- Max Power 100W
- The input control signal is compatible with 3.3V and 5V
- Supports SPWM and SPVMW control algorithms (not support traditional 6-step commutation control algorithms)
- Small package 26mm x 21mm
Three-PhaseBrushless-DCMotorControl
ระวัง: ข้อ จำกัด ด้านพลังงาน Power limitations
- SimpleFOCMini ออกแบบมาสำหรับมอเตอร์ gimbal ที่มีความต้านทานภายในสูงกว่า R>10Ohm กระแสสูงสุดสัมบูรณ์ของบอร์ดนี้คือ 5A โปรดตรวจสอบให้แน่ใจว่ามอเตอร์ BLDC ที่ใช้เป็นไปตามข้อจำกัดเหล่านี้เมื่อใช้บอร์ดนี้ในโครงการของคุณ หากคุณยังต้องการใช้ไดรเวอร์นี้กับมอเตอร์ BLDC ที่มีความต้านทานต่ำมาก R < 1 โอห์ม ตรวจสอบให้แน่ใจว่าได้จำกัดแรงดันไฟฟ้าที่ตั้งค่าไว้ที่บอร์ด
สำหรับข้อมูลเพิ่มเติมเล็กน้อยเกี่ยวกับตัวเลือกของมอเตอร์ โปรดไปที่ BLDC motor docs
//default voltage_power_supply
motor.voltage_limit = 2;https://docs.simplefoc.com/mini_getting_started

https://docs.simplefoc.com/mini_connect_hardware
Wiring
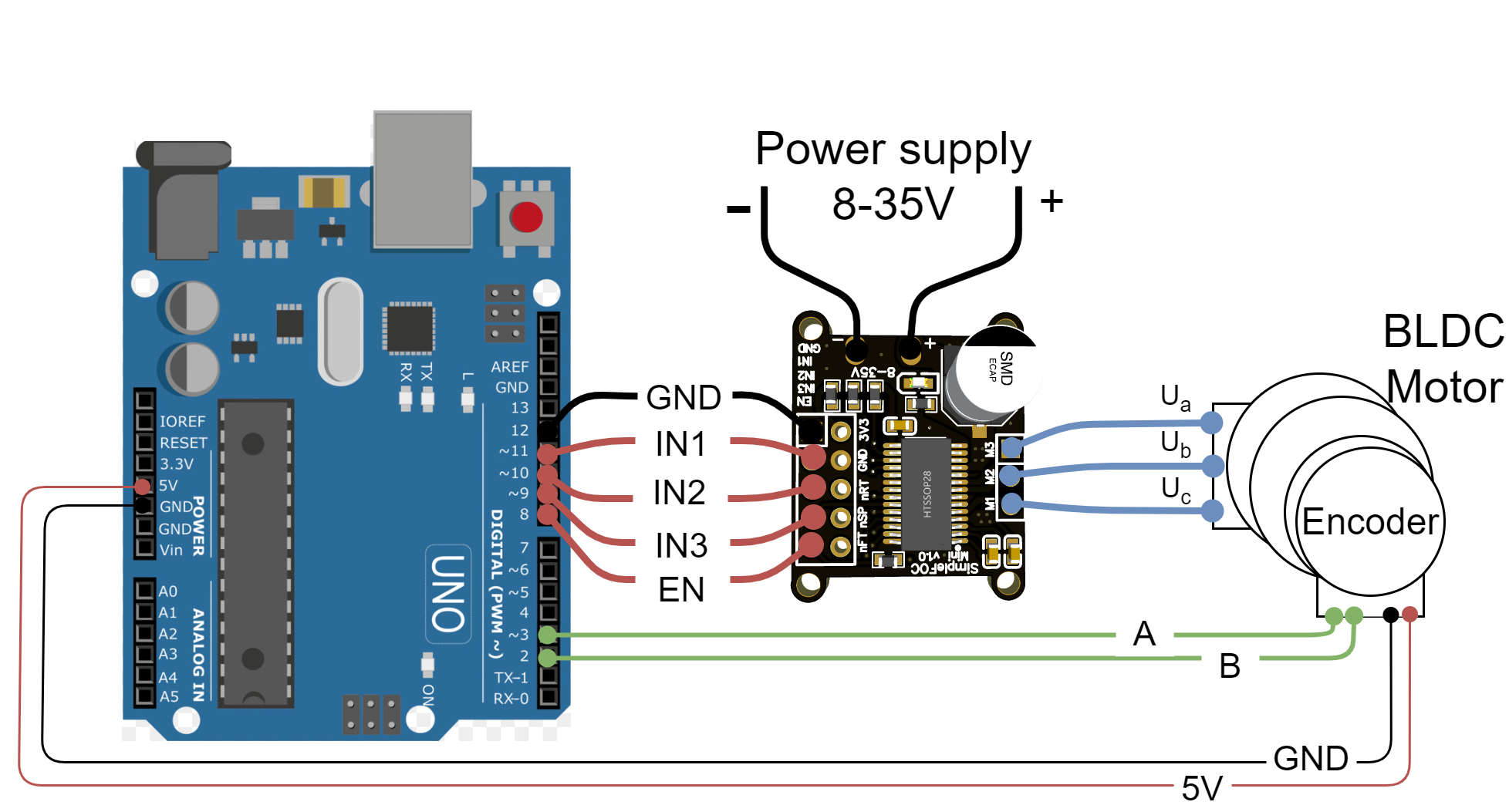
การเชื่อมต่อ SimpleFOCMini (V1.0 / V1.1) → Arduino UNO
SimpleFOCMini ให้ควบคุมด้วย PWM + Enable 5 เส้น
แนะนำต่อทาบซ้อนบน UNO เพื่อใช้งานง่ายที่สุด
| Arduino UNO Pin | SimpleFOCMini Pin |
|---|---|
| D12 | GND (Reference ground) |
| D11 | IN1 |
| D10 | IN2 |
| D9 | IN3 |
| D8 | EN (Enable / PWM Master) |
EN สามารถเป็น PWM (มักใช้ frequency 25k–30kHz) คุมความเร็ว
IN1–IN3 ใช้ generate SVPWM/Foc modulation per phase
แหล่งจ่ายไฟที่ต้องมี
| Supply | รายละเอียด |
|---|---|
| VMotor | ตามสเปคมอเตอร์ เช่น 12V/24V |
| 5V Logic | จาก Arduino หรือภายนอก (แนะนำ External หากภาระเยอะ) |
| ร่วม GND ทุกจุด | สำคัญ ห้ามลืม |
ไม่รับโหลดสูงเกิน หากกระแสมอเตอร์เกิน 1.5–2A แนะนำเพิ่ม Driver ภายนอก (L6234, DRV8313, B-G431B-ESC1 ฯลฯ)
สิ่งที่ต้องระวัง
| ประเด็น | เหตุผล |
|---|---|
| มอเตอร์โหลดหนัก → บอร์ดร้อน | SimpleFOCMini ไม่มี power stage ใหญ่ |
| ต้องมี Sensor (Encoder / Hall) ถ้าจะใช้ FOC | แบบ sensorless ได้ แต่ Start torque อ่อนกว่า |
| ต่อสายผิดลำดับ → หมุนกลับทิศ | แก้ด้วยการสลับ Phase 2 เส้น |
SimpleFOCMini can be directly plugged into the Arduino headers of the UNO board from the pin 8 to the 12 pin (pin 12 can act as a GND pin) and in that way reduce the amount of wires necessary. For more information on this example connection see this library example.
| Mini Pin | EN | IN3 | IN2 | IN1 | GND |
| UNO Pin | 8 | 9 | 10 | 11 | 12 |
BLDCDriver3PWM driver = BLDCDriver3PWM(11, 10, 9, 8);Installing the SimpleFOClibrary
- https://docs.simplefoc.com/installation#installing-the-simplefoclibrary
- https://docs.simplefoc.com/library_download
Product List:
- 1x DC brushless motor driver module
- 1x 5P double header
- 1x 3P single header
- 1x 2P single header
BLDC Servo Motor Development Board
- BLDC Servo Motor Development Board https://docs.simplefoc.com/simplefocmini
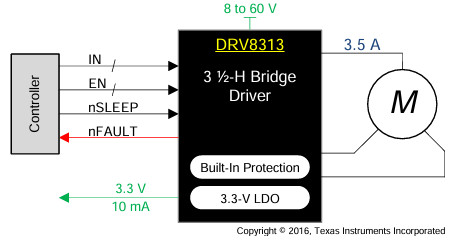
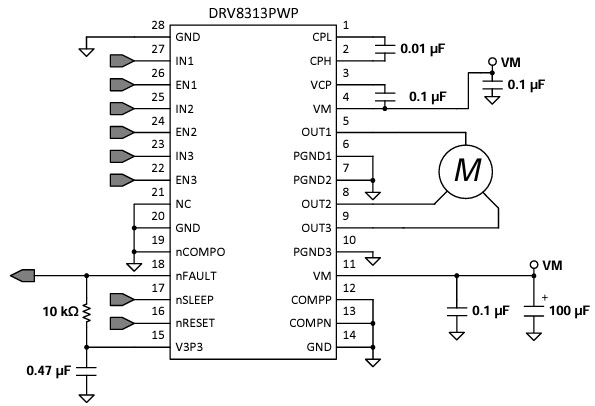
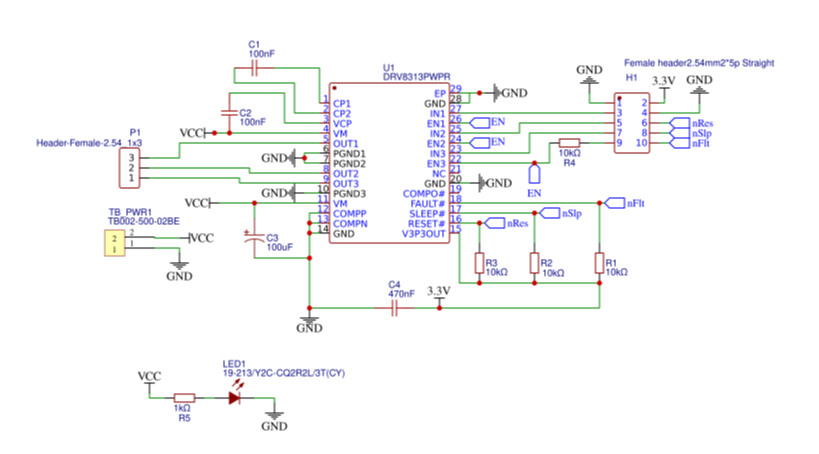
- DRV8313 2.5-A Triple 1/2-H Bridge Driver 65-V max, 3-A peak 3-phase motor driver
- https://www.ti.com/lit/ds/symlink/drv8313.pdf?ts=1650461862269&ref_url=https%253A%252F%252Fwww.google.com%252F
PCB Dimension 20x26mm

// Open loop motor control example
// Open loop motor control example
#include <SimpleFOC.h>
// BLDC motor & driver instance
// BLDCMotor motor = BLDCMotor(pole pair number);
BLDCMotor motor = BLDCMotor(11);
// BLDCDriver3PWM driver = BLDCDriver3PWM(pwmA, pwmB, pwmC, Enable(optional));
BLDCDriver3PWM driver = BLDCDriver3PWM(11, 10, 9, 8);
// Stepper motor & driver instance
//StepperMotor motor = StepperMotor(50);
//StepperDriver4PWM driver = StepperDriver4PWM(9, 5, 10, 6, 8);
//target variable
float target_velocity = 0;
// instantiate the commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&target_velocity, cmd); }
void doLimit(char* cmd) { command.scalar(&motor.voltage_limit, cmd); }
void setup() {
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 12;
// limit the maximal dc voltage the driver can set
// as a protection measure for the low-resistance motors
// this value is fixed on startup
driver.voltage_limit = 6;
driver.init();
// link the motor and the driver
motor.linkDriver(&driver);
// limiting motor movements
// limit the voltage to be set to the motor
// start very low for high resistance motors
// currnet = resistance*voltage, so try to be well under 1Amp
motor.voltage_limit = 1; // [V]
// open loop control config
motor.controller = MotionControlType::velocity_openloop;
// init motor hardware
motor.init();
// add target command T
command.add('T', doTarget, "target velocity");
command.add('L', doLimit, "voltage limit");
Serial.begin(115200);
Serial.println("Motor ready!");
Serial.println("Set target velocity [rad/s]");
_delay(1000);
}
void loop() {
// open loop velocity movement
// using motor.voltage_limit and motor.velocity_limit
motor.move(target_velocity);
// user communication
command.run();
}
การใช้ Simple FocMini ควบคุม BLDC Motor ผ่าน Arduino





รีวิว
ยังไม่มีบทวิจารณ์