

RBAE04 หุ่นยนต์ แขนกลเพื่อการศึกษา Education Robot Arm WLKATA Mirobot 6 Axis DOF ROS-EDU Education Kit
คำอธิบาย
หุ่นยนต์แขนกล Robotic Arm พร้อมการควบคุมหุ่นยนต์ด้วย ROS เพื่อเรียนรู้พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม
- สนุกไปกับการพัฒนาเรียนรู้แขนหุ่นยนต์ Mirobotแขนหุ่นยนต์ที่ควบคุมด้วย ROS ได้อย่างสมบูรณ์แบบ
- สามารถประกอบและนำไปใช้งาน เรียนรู้ระบบอัตโนมัติในอุตสาหกรรม ได้หลายอย่าง
- ประยุกต์ใช้ในงานจับและเคลื่อนย้ายวัตถุ, จับชิ้นงานบนสายพานลำเลียง, งาน Vision กล้องติดตามวัตถุ, Image Processing, Automation, Logistics, STEM Robot, Education Robot, Smart Factory Robot
- มีความยืดหยุ่นในการวางแผนการ การเรียนรู้ในแต่ละช่วงวัย รองรับ Python, C, C++, ROS, V-REP, MATLAB และซอฟต์แวร์อื่นๆ สำหรับการพัฒนาขั้นที่สอง
Parameters
- Material Aluminum Alloy, ABS Engineering plastics
- 6 + 1 Axis
- Payload 400g. Limit Loads 600g
- Repeated positioning accuracy ± 0.2mm
- Power input DC12 V / 4A (50W Max)
Axis Motion Parameters
- 1-axis: -110° ~ +160° maximum speed 85°/s
- 2-axis: -35° ~ +70° maximum speed 60°/s
- 3-axis: -120° ~ +60° maximum speed 65°/s
- 4-axis: -180° ~ +180° maximum speed 200°/s
- 5-axis: -200° ~ +30° maximum speed 200°/s
- 6-axis: -360° ~ +360° maximum speed 450°/s
End-effectors & Controller
|
Shaft
|
Working Range
|
Maximum
|
|
Gripper
|
Opening size:27.5mm
|
Pressure:8N
|
|
Suction Cup
|
Diameter:10mm
|
Pressure:-58Kpa
|
|
3-Finger Soft Gripper
|
Opening size:27.5mm
|
Pressure:-58Kpa
|
EDU Education Set ในชุดประกอบด้วย
- WLKATA Mirobot robot arm X 1
- Power Supply x 1
- Pen holding x 1
- Micro servo gripper module x 1
- Extender Multifunctional Box x 1, High-speed USB cable x 1, IDC Cable x 1
- Mirobot Mecha sticker x 1
- Handbook x 1
- Pneumatic Set (Pneumatic Box, Suction Cup, 2-Finger Gripper, 3-Finger Soft Gripper) x 1 set
- –

- Download the software and support documents of WLKATA robotics products https://www.wlkata.com/support/download-center
- CH340 Driver (USB serial port driver) https://dl.dropboxusercontent.com/s/5omtttgugbaq8fx/CH340%20Driver.zip?dl=0
- หุ่นยนต์แขนกล 6 แกน สเปคภาษาไทย https://docs.google.com/document/d/107ZS-GjaHJPKJe7_7C8tpsGZxHp5C7k8mB2Rimh4nLs/edit?usp=sharing
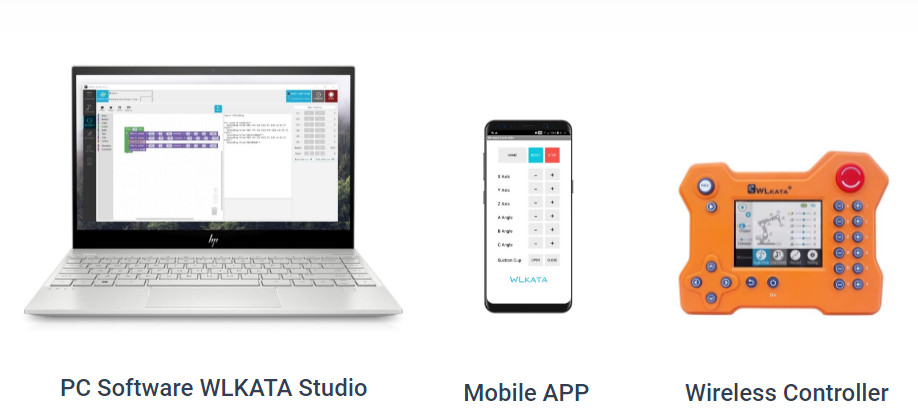
Various Control Methods For Beginner And Professional Users
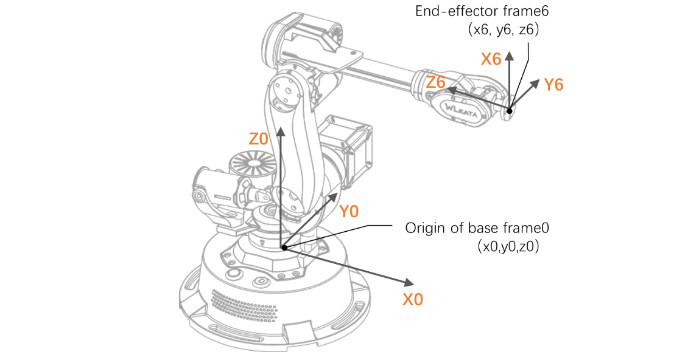
Structure of WLKATA Mirobot

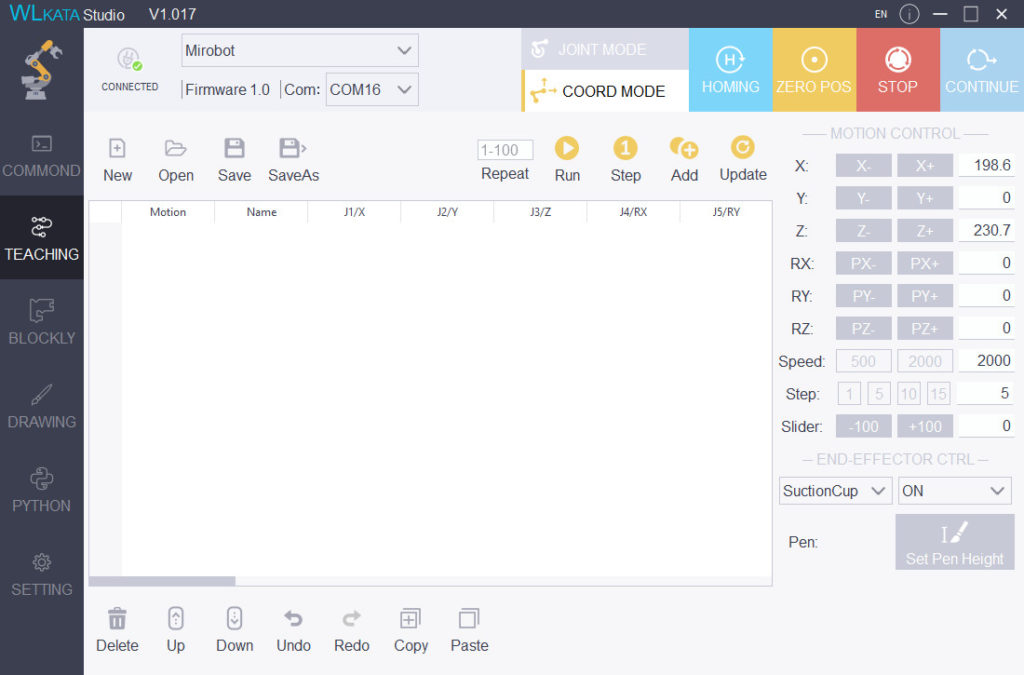
1. คู่มือเริ่มต้นใช้งานฉบับย่อของ Mirobot
บทนี้จะแนะนำสั้น ๆ เกี่ยวกับวิธีการควบคุมหุ่นยนต์โดยใช้ WLKATA Studio เพื่อให้ผู้ใช้สามารถเข้าใจและใช้หุ่นยนต์ได้อย่างรวดเร็ว ขั้นตอนการดำเนินการโดยรวมแสดงไว้ในรูปด้านล่าง

2. การใช้ฟังก์ชันการสอน
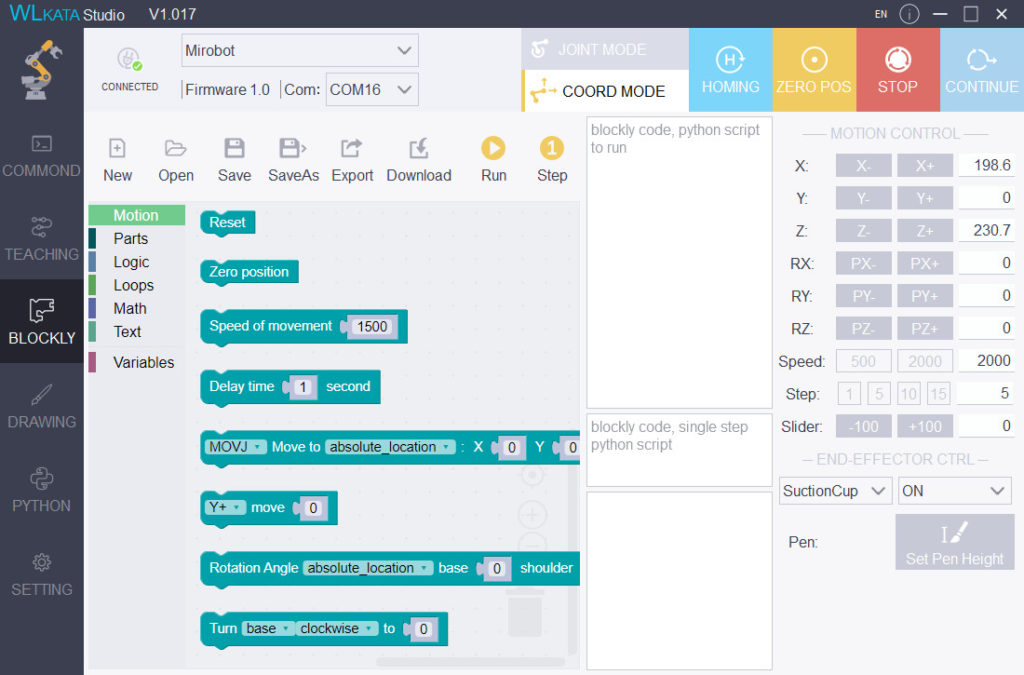
3. การใช้ฟังก์ชัน BLOCKLY
4. การใช้โมดูลกริปเปอร์
https://lin-nice.github.io/mirobot_gitbook_en/4-wlkata.html
5. การใช้ฟังก์ชั่นการวาด

6. การใช้ชุดนิวเมติก
https://lin-nice.github.io/mirobot_gitbook_en/6-wlkata.html
7. การใช้โปรแกรม Python Python programming
ขั้นตอน (1) เปลี่ยนไปใช้ฟังก์ชัน Python ใน WLKATA Studio โดยคลิกแท็บ PYTHON ในอินเทอร์เฟซซอฟต์แวร์
https://lin-nice.github.io/mirobot_gitbook_en/7-wlkata.html
ภาคผนวก I
การดำเนินการสอบเทียบ WLKATA Mirobot
https://lin-nice.github.io/mirobot_gitbook_en/15-wlkata.html
สินค้าที่เกี่ยวข้อง
-

RC8106 รถแมคคานั่ม Robot Car Mecanum 80mm Wheel Aluminum Motor Gear DC12V Encoder Arduino PS2 Wireles Joystick Control
฿7,600.00สั่งจองสินค้าได้
รถล้อแมคคานั่ม Mecanum Robot Car Wheel80mm-01ENAL+PS2 Arduinoหยิบใส่ตะกร้า -
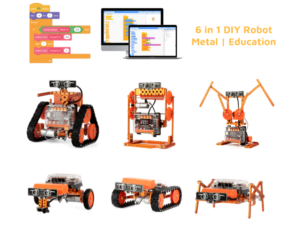
STEAM02 Programmable Robot Kit WeeeBot High Schools University
ลดราคา! Original price was: ฿6,900.00.฿3,900.00Current price is: ฿3,900.00.มีสินค้าอยู่ 1
หยิบใส่ตะกร้า -
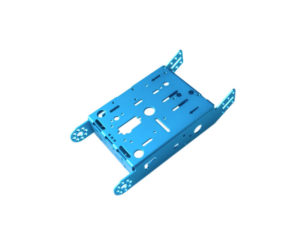
RCA301 โครงรถอลูมิเนียม โครงรถหุ่นยนต์ Aluminum Frame Robot Car Chassis 01
฿189.00สั่งจองสินค้าได้
หยิบใส่ตะกร้า
รีวิว
ยังไม่มีบทวิจารณ์