-
×
 BDDV10 บอร์ดพัฒนา QCA7000 PEV EVSE Home Plug GreenPHY ISO15118 Raspberry Pi
BDDV10 บอร์ดพัฒนา QCA7000 PEV EVSE Home Plug GreenPHY ISO15118 Raspberry Pi สั่งจองสินค้าได้
1 × ฿4,900.00
รวม: ฿4,900.00
BDDV10 บอร์ดพัฒนา QCA7000 PEV EVSE Home Plug GreenPHY ISO15118 Raspberry Pi สั่งจองสินค้าได้
1 × ฿4,900.00รวม: ฿4,900.00

หุ่นยนต์แขนกล Robotic Arm พร้อมการควบคุมหุ่นยนต์ด้วย ROS เพื่อเรียนรู้พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม
Parameters
Axis Motion Parameters
End-effectors & Controller
|
Shaft
|
Working Range
|
Maximum
|
|
Gripper
|
Opening size:27.5mm
|
Pressure:8N
|
|
Suction Cup
|
Diameter:10mm
|
Pressure:-58Kpa
|
|
3-Finger Soft Gripper
|
Opening size:27.5mm
|
Pressure:-58Kpa
|
Pro Professional Set ในชุดประกอบด้วย

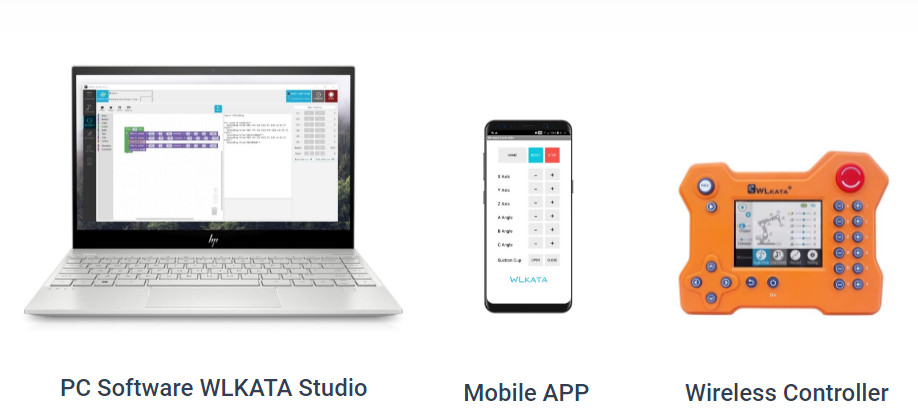
Various Control Methods For Beginner And Professional Users
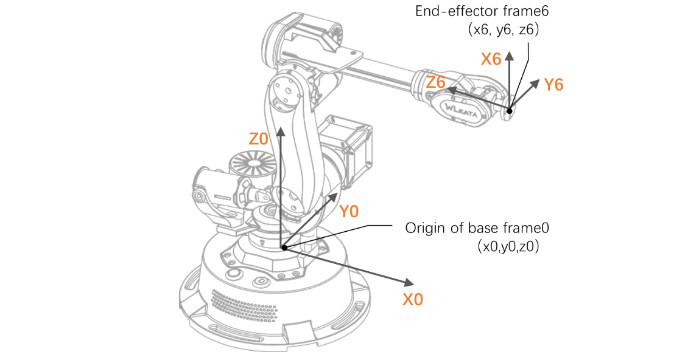
Structure of WLKATA Mirobot

1. คู่มือเริ่มต้นใช้งานฉบับย่อของ Mirobot
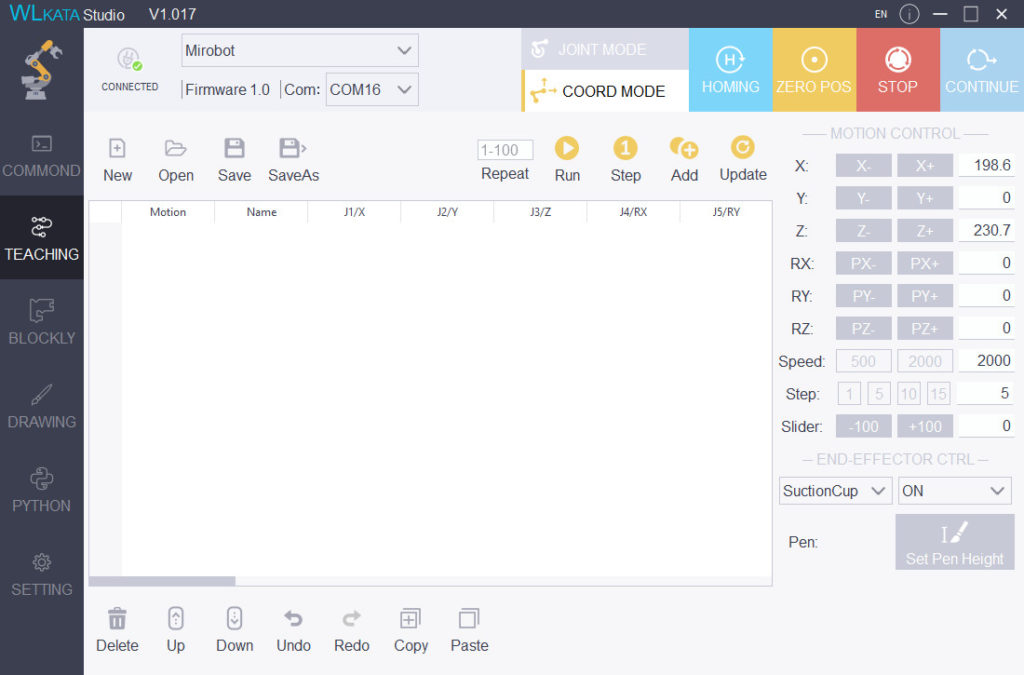
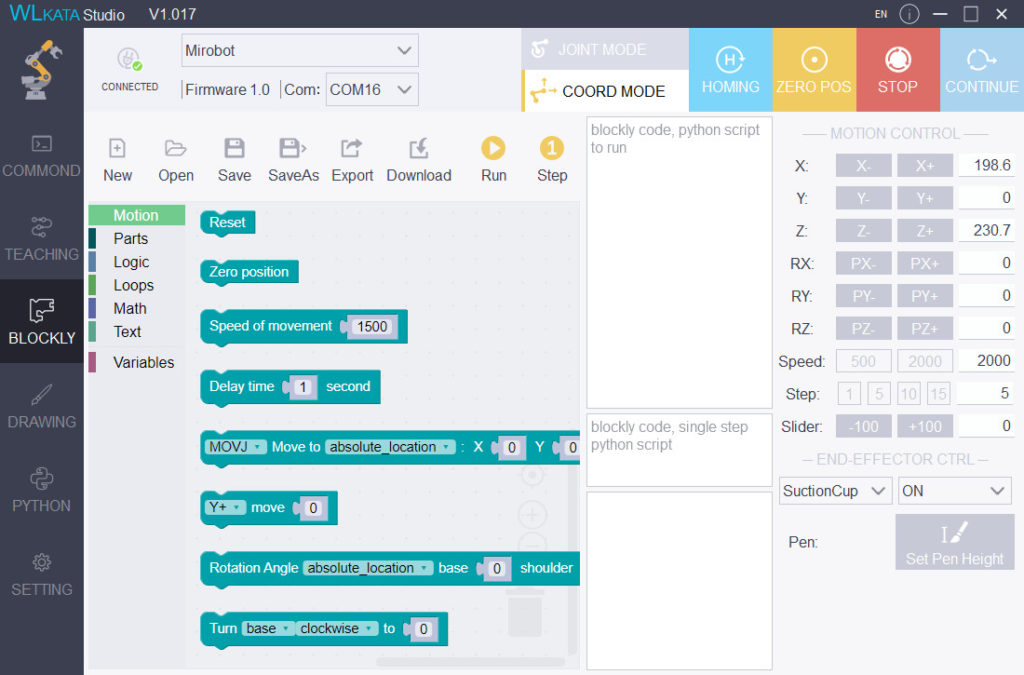
บทนี้จะแนะนำสั้น ๆ เกี่ยวกับวิธีการควบคุมหุ่นยนต์โดยใช้ WLKATA Studio เพื่อให้ผู้ใช้สามารถเข้าใจและใช้หุ่นยนต์ได้อย่างรวดเร็ว ขั้นตอนการดำเนินการโดยรวมแสดงไว้ในรูปด้านล่าง

2. การใช้ฟังก์ชันการสอน
3. การใช้ฟังก์ชัน BLOCKLY
4. การใช้โมดูลกริปเปอร์
https://lin-nice.github.io/mirobot_gitbook_en/4-wlkata.html
5. การใช้ฟังก์ชั่นการวาด

6. การใช้ชุดนิวเมติก
https://lin-nice.github.io/mirobot_gitbook_en/6-wlkata.html
7. การใช้โปรแกรม Python Python programming
ขั้นตอน (1) เปลี่ยนไปใช้ฟังก์ชัน Python ใน WLKATA Studio โดยคลิกแท็บ PYTHON ในอินเทอร์เฟซซอฟต์แวร์
https://lin-nice.github.io/mirobot_gitbook_en/7-wlkata.html
ภาคผนวก I
การดำเนินการสอบเทียบ WLKATA Mirobot
https://lin-nice.github.io/mirobot_gitbook_en/15-wlkata.html
Robotics Planning, Control and Application –Manual of Experiments Based on Mirobot
สั่งจองสินค้าได้
หยิบใส่ตะกร้า
สั่งจองสินค้าได้
หยิบใส่ตะกร้า
สั่งจองสินค้าได้
อ่านเพิ่ม
รีวิว
ยังไม่มีบทวิจารณ์